Geology Reference
In-Depth Information
The asymmetric deformation of a tectonic ele-
ment of continental crust during its motion can
be described by modifying the format of the
tables associated with rotation models (Fig.
2.29
).
Such a modification should consist into the in-
troduction of an additional field, which would
allow to establish the amount of shortening or
extension, with respect to the present day shape,
that a block experienced during its motion. This
method cannot be used to describe a symmetric
extension between two plates during a rifting
phase, because the additional attribute refers to
a single tectonic element which will be rotated
with respect to a parent plate, not to a plate
pair. For example, the method can be used in the
modelling of back arc basins, or in the descrip-
tion of complex systems, such as the assemblage
of microplates, slivers, and orogenic structures
that characterizes the Alpine-Himalayan belt. In
general, the additional field would describe the
deformation of a continental block during a stage
rotation through a stretching (or shortening) fac-
tor. For example, a value of 0.9 at 10 Ma would
mean that in a reconstruction at 10 Ma we must
shorten the tectonic element by 10 % with respect
to the present size, in the direction determined by
the stage matrix between 10 Ma and the present.
Similarly, if the deformation parameter is 0.8 at
20 Ma, this value implies two different phases of
extension, the first one between 20 and 10 Ma
and a second one between 10 Ma and the present.
Of course, these two phases of deformation could
develop along different directions, determined by
diverse stage poles, so that in general the present
day shape of a tectonic element would result from
the superposition of several tectonic events. An
example illustrating the combination of rotations
and phases of extension is shown in Fig.
2.35
.
Describing the kinematics of deformable bod-
ies requires special techniques and an additional
computational effort for generating plate recon-
structions of the tectonic evolution of a region.
For example, it is not generally possible to deter-
mine the initial shape and location of a tectonic
element through a single finite rotation, accom-
panied by deformation of the block, because
usually the present day geometry results from
the superposition of different phases of extension
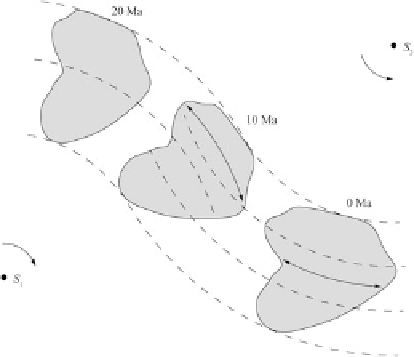
Fig. 2.35
Deformation of a continental block during its
motion. In this example, a tectonic element rotates clock-
wise about the stage pole
S
1
between 20 and 10 Ma,
and counterclockwise about
S
2
between 10 Ma and the
present. During the first stage, it is stretched in the same
directions of the flow lines about
S
1
. Then, a second phase
of deformation is superimposed on the first one, and the
block is stretched again, this time in the direction of the
flow lines about
S
2
or shortening, which develop along distinct axes
of deformation. Now we are going to describe,
in a simplified form, the procedure of stretching
or shortening of a tectonic element along an
assigned direction, which cannot be defined as a
trivial algorithm.
The procedure of block deformation starts
with its rotation to a reference frame where
the stage pole coincides with the North Pole
(Fig.
2.36
). Then, the points having minimum
and maximum latitudes, in the set of
N
vertices associated with the spherical polygon
representation, are determined. Let
q
s
and
q
n
be
respectively these two points (Fig.
2.36
), and
assume that the sequence of vertices (
q
1
,
q
2
, :::,
q
N
) is a clockwise sequence. The points
q
s
and
q
n
can be used to divide the perimeter of the
tectonic element in two halves: an eastern half
that includes vertices from
q
s
to
q
n
,andawestern
sequence, which includes vertices from
q
n
to
q
s
.
For each point in the western sequence,
q
i
,let
•
¥
i
be the longitudinal distance from the western
boundary. If “ is the deformation factor, then
q
i
is
moved along its parallel to a new location, q
i
,in
such a way that •¥
i
D
“•¥
i
. Finally, the resulting