Geology Reference
In-Depth Information
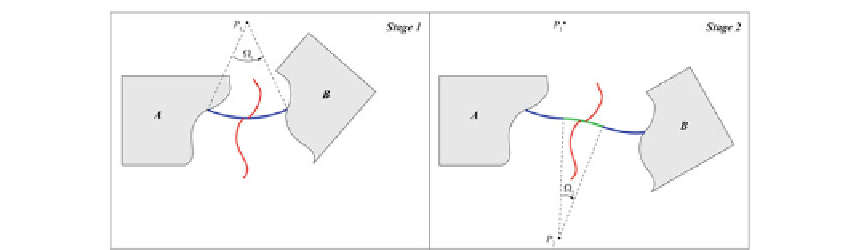
Fig. 2.24
Geometry of fracture zones. In a reference
frame fixed to
A
, plate
B
rotates counterclockwise about
pole
P
1
by an angle
1
(stage 1). The resulting fracture
zone has the shape of a small circle arc about
P
1
(
blue
line
). The subsequent clockwise rotation about pole
P
2
during stage 2 separates the fracture zone in two arms
and inserts a new small circle about
P
2
in the central zone
(
green line
)
marine magnetic anomalies and the observation
that the trace of oceanic fracture zones can be
invariably decomposed into chains of small circle
arcs. However, we shall prove that it has a more
general validity. Furthermore, this principle puts
strong constraints on the equilibrium of the driv-
ing forces of plate tectonics, thus representing a
conceptual linkage between plate kinematics and
geodynamics.
The sketch of Fig.
2.24
illustrates the pro-
cess through which a fracture zone assumes the
distinctive shape of a chain of small circles.
On the basis of the fundamental principle stated
above, if (
T
0
,
T
2
, :::,
T
n
) are stage boundaries,
T
0
<
T
1
<:::<
T
n
, then there exist
n stage poles
P
1
,
P
2
, :::,
P
n
such that the relative displacement
of a plate
B
during the
k
th stage can be rep-
resented by a finite rotation matrix
S
BA
(
T
k
1
,
T
k
)
about the axis
n
k
associated with the
k
th Euler
pole
P
k
(Eq.
2.18
). This rotation, which moves
B
from the location at time
T
k
1
to the position
occupied at time
T
k
, is called a
stage rotation
.
It can be represented either by matrix compo-
nents (Eq.
2.18
) or as a triplet (œ
k
,¥
k
,
k
), where
(œ
k
,
¥
k
) are the geographic coordinates of a stage
pole
P
k
and
k
is the finite angle of rotation
during that stage (Fig.
2.24
). Clearly, if a set of
forward transformations
S
BA
(
T
k
1
,
T
k
) has been
established, we can also move back through time
and determine the relative position of
B
at time
T
k
1
given the position at time
T
k
. This oper-
ation simply requires application of the inverse
transformation:
S
BA
.T
k
;T
k1
/
D
S
1
BA
.T
k1
;T
k
/
(2.40)
If
T
k
1
T
T
k
is an intermediate time during
the
k
th stage, then the relative position of
B
at
time
T
can be determined by taking as rotation
angle the reduced angle (
T
):
T
T
k1
T
k
T
k1
k
.T/
D
(2.41)
Now let us consider the central point of a
transform fault that belongs to a present day
or extinct mid-ocean ridge. Let
r
0
be the posi-
tion vector of this point. We are looking for an
algorithm that simulates the geometry of the frac-
ture zone passing through
r
0
. The task should be
accomplished calculating iteratively the location
of this point, relative to each of the conjugate
plates
A
and
B
, at any time
T
2
[
T
0
,
T
n
], where
T
0
and
T
n
are respectively the time of onset of sea
floor spreading and the present day (or the time
of extinction). In this algorithm, it is necessary
to take into account that for any stage the point
moves by half of the full stage angle
k
on each
of the conjugate plates. Therefore, the point must
be rotated using
reduced
backward stage pole
matrices,
S
BA
(
T
k
,
T
k
1
)and
S
AB
(
T
k
,
T
k
1
), hav-
ing the same stage pole locations of
S
BA
(
T
k
,
T
k
1
)
and
S
AB
(
T
k
,
T
k
1
), respectively, but halved stage
angles. If
T
k
1
T
T
k
, then the location of
r
0
at
time
T
on plate
A
,
r
A
(
T
), will be given by:
r
A
.T/
D
S
BA
.T
k
;T/:::S
BA
.T
n1
;T
n2
/
S
BA
.T
n
;T
n1
/r
0
(2.42)