Geology Reference
In-Depth Information
Therefore, taking the determinant of Eq. (
2.12
)
gives:
det
A
I
A
D
det
A
I
det.A/
T
T
D
det
A
I
D
det.A
I/
D
det.I
A/
(2.14)
T
Now we take into account that for any 3
3
matrix
R
:det(
R
)
D
(
1)
3
R
D
R
. In the case of
Eq. (
2.14
), it results:
det.A
I/
D
det .I
A/
D
det.A
I/
”
det.A
I/
D
0
(2.15)
Therefore, a vector
n
¤
0
exists such that:
.A
I/ n
D
0
(2.16)
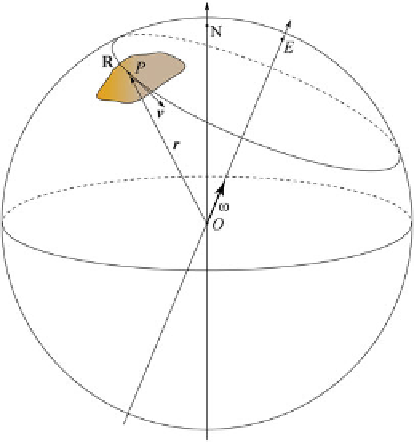
Fig. 2.1
Geometry of the instantaneous motion of a tec-
tonic plate
R
.
E
is the Euler pole,
N
is the North Pole.
P
is a representative point on
R
, whose instantaneous linear
velocity is
v
. ¨ is the Euler vector of
R
Equation (
2.16
) is a particular eigenvalue
equation, where
A
has eigenvalue œ
DC
1and
n
is the corresponding eigenvector. This means that
n
is invariant under transformation
A
. Therefore,
a diameter aligned with the direction of
n
will
remain unchanged after the transformation. This
proves Euler's theorem.
rotation. We can easily build a vector, which
contains all the information associated with an
instantaneous rotation. Such a vector is called an
Euler vector
and has magnitude ¨ and direction
coinciding with the direction of the rotation axis
(Fig.
2.1
). In order to assign a unique versor,
n
,to
an Euler vector, we conform to the common prac-
tice of assuming that all rotations are counter-
clockwise rotations.
In this instance, the linear velocity of a point
P
can be calculated by the following formula:
The importance of Euler's theorem for the
mathematical formulation of plate kinematics is
not immediately evident, despite almost all topics
and articles about this subject emphasize its fun-
damental role. If we assume a spherical Earth,
tectonic plates can be considered as rigid
spher-
ical caps
, which are constrained to move about
its centre. Their instantaneous motion is always
represented by an infinitesimal rotation about an
axis, as illustrated in Fig.
2.1
, and this state-
ment holds independently from Euler's theorem,
despite it could be inferred from it. In these
rotations, an arbitrary point
P
lying on a tectonic
plate,
R
, is moved along a
small circle arc
about
the rotation axis with a velocity
v
whose magni-
tude depends from the distance of
P
from the axis.
However, the rigidity of
R
ensures that different
points will travel the same
angular
distance
d
'
in a small time interval
dt
, so that a unique
angular velocity ¨
D
d
'/
dt
, which is independent
from the point, characterizes the instantaneous
v
D
¨
r
(2.17)
where ¨
D
¨
n
is the Euler vector of the in-
stantaneous rotation. In general, the motion of
a tectonic plate proceeds through a sequence of
infinitesimal rotations about continuously chang-
ing Euler axes. Thus, in principle, reconstructing
its position at a given time in the geologic past
would require a backtracking procedure, based
upon a complete knowledge of the sequence of
instantaneous rotations. However, the standard
approach adopted in plate kinematic modelling