Geology Reference
In-Depth Information
10
4
0.1 ms
1
,
Fig. 10.3
Frictional response, state evolution, slider ve-
locity, and displacement in a numerical slide-hold-slide
experiment. The applied stress
£
is reduced by 10 % at
time
t
0
ters are:
L
D
m,
a
D
0.005,
b
D
2
a
,
v
0
D
0.005 kg m
2
. The static friction coeffi-
cient
s
increases logarithmically with the duration of the
stick interval
t
-
t
1
. During this time interval, the state
variable ™ increases linearly according to (
10.2
) with
v
0
D
0.6,
M
D
0.001 s, while sliding at constant reference ve-
locity
v
0
is restored as soon as
v
D
v
(
t
1
) D 0(
black lines
)
or at a later time (
colored lines
). The assumed parame-
D
D
0
trigger the onset of sliding. As we have seen
above, the stress required to put the slider in
motion will increase with the stick time as a
consequence of the healing phenomenon. This
reflects the fact that the interface region between
slider and sliding surface is effectively a mul-
ticontact interface, along which a population of
contact points supporting the load ¢ increases
logarithmically with the hold time.
The friction law (
10.1
) predicts instability of
sliding under some specific conditions. Let us
consider a spring-slider system pulled at constant
velocity
V
0
(Fig.
10.5
). The equation of motion
for the slider simply states that the accelera-
tion of a unit mass having unit contact area is
proportional to the net force resulting from the
combination of spring pull (or push) and friction:
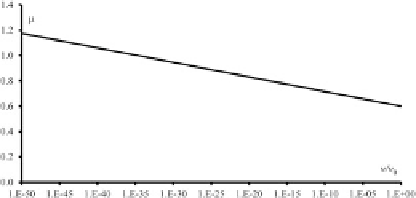
Fig. 10.4
Steady state dynamic friction coefficient as a
function of relative velocity. Note the logarithmic scale
of
the
horizontal
axis.
The
assumed
parameters
are:
a
D
0.005,
b
D
2
a
,
v
0
D
0.1 ms
-1
,
0
D
0.6
say 10
8
m/s, but the resulting
dynamic
friction,
which is comparable to
0
, will immediately
stop the slider. We could not even detect the
corresponding small displacement. Conversely, if
the applied stress is sufficiently high to accelerate
the mass to a macroscopic velocity
v
having the
same order of magnitude of
v
0
, we can eventually
balance the frictional stress at that velocity and
R
u
D
KŒ
u
.t/
V
0
t
.
v
;™/
(10.9)
where
K
represents the spring stiffness and £ is
the frictional stress exerted on the slider.