Geology Reference
In-Depth Information
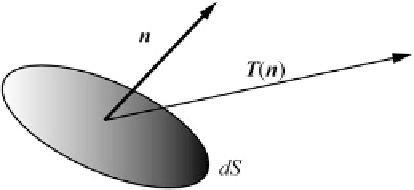
Fig. 7.1
The traction across a surface element within a
deformed body
that do not involve volume changes. These forces
can be modelled assuming that for any arbitrary
surface element
d
S
D
n
dS
,
n
being the versor
normal to the surface and
dS
its infinitesimal
area, there exists a force per unit area
T
D
T
(
n
)
across the surface element, which depends from
its orientation and from the mechanical state of
the body (Fig.
7.1
). This is a representation of the
distributed contact interaction between molecules
and atoms across the surface element, so that
the effective force exerted across
d
S
will be the
infinitesimal force
d
F
(
n
)
D
T
(
n
)
dS
. The vector
T
, which has units [Nm
2
]
[Pa], is called
traction
. In equilibrium conditions, the force ex-
erted on the molecules that are close to one of
the two sides of the surface element has equal
magnitude and opposite direction with respect to
the force exerted on the molecules that lie along
the opposite side, thereby
T
(
n
)
D
T
(
n
). The
components of
T
that are normal and parallel to
the plane of
dS
are called, respectively,
normal
stress
and
shear stress
. In the case of a liquid
substance, the shear stress is always zero, so that
T
D
P
n
,where
P
is the
hydrostatic pressure
.
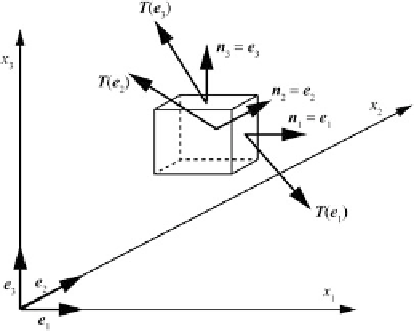
Let us consider now the system of surface
forces exerted on a volume element
dV
within
a deformed body. Let us assume that
dV
is a
small parallelepiped with sides parallel to the
coordinate axes of a Cartesian reference frame
(Fig.
7.2
). In the following, we shall use in most
cases index notation (
x
1
x
,
x
2
y
,
x
3
z
) and Einstein's convention summation, which
allows to simplify the mathematical notation. In
equilibrium conditions, the tractions exerted on
opposite sides of
dV
have equal magnitude and
opposite directions. We shall assume that the unit
Fig. 7.2
Tractions exerted on a volume element
dV
, with
sides
dx
i
dx
j
,
i
,
j
D 1,2,3
vector representing the orientation of a surface
element is always directed
outwards
from closed
surfaces. In the case of the volume element
dV
,
three of its sides have versors
n
i
coinciding with
thebaseversors
e
i
(Fig.
7.2
). The components of
the three tractions vectors
T
(
e
i
) form a rank-two
tensor called
stress tensor
:
ij
D
T
i
e
j
(7.1)
With this notation, the second index of the
stress tensor indicates the direction of the surface
across which the traction is exerted, while the first
index identifies the traction component. We shall
prove soon that this tensor completely determines
the surface force field existing within a deformed
body. The sign convention for the stress tensor is
that when a diagonal component £
ii
is
positive
,
then it is directed
outwards
the volume element
under consideration, while a positive off-diagonal
component
£
ij
(
i
¤
j
) indicates that the corre-
sponding shear stress component is directed as
e
i
.
For example,
£
32
>0 implies that a shear stress
is exerted on the surface element
dx
1
dx
3
(whose
normal versor is
e
2
) in the direction of
e
3
.This
convention is illustrated in Fig.
7.3
.
In equilibrium conditions, it is easy to deter-
mine the tractions on the opposite faces of the
volume element. In fact, we have simply:
T
i
(
e
j
)
D
T
i
(
e
j
)
D
-£
ij
. Therefore, while the total force
exerted on the volume element is clearly zero,