Geology Reference
In-Depth Information
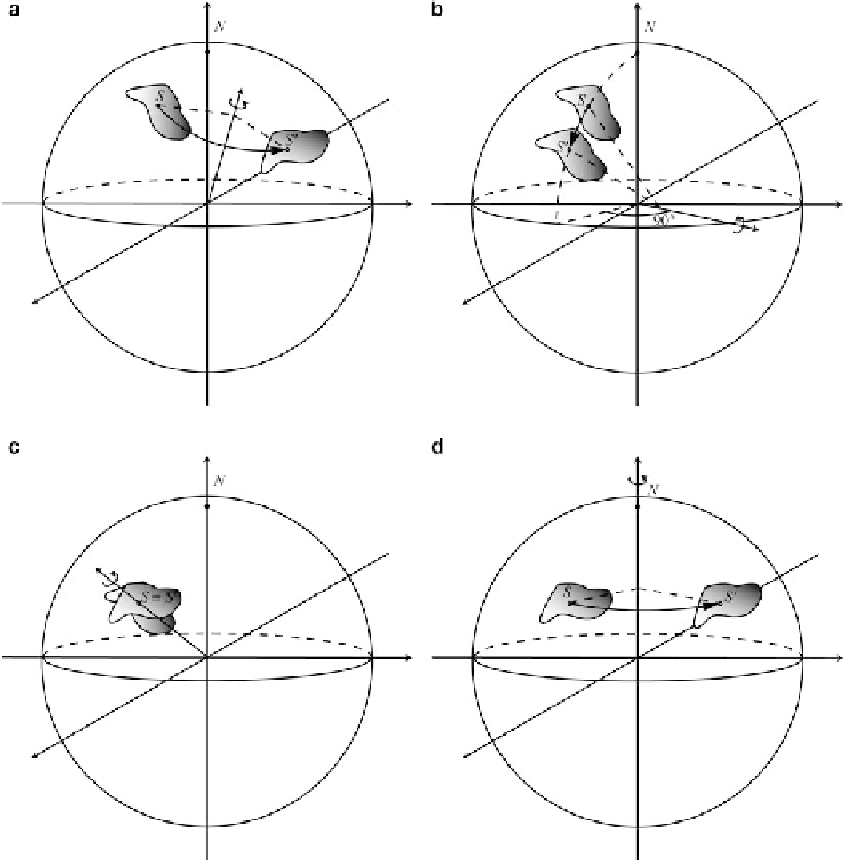
Fig. 6.16
Decomposition of Euler rotations. Given a
rotation on the sphere (
a
), an arbitrary reference site
S
will be subject to a variation of paleolatitude, declination,
and longitude. These variations can be described by three
elementary transformations: a rotation about an Equatorial
pole, located 90
ı
E from the initial longitude (
b
), a vertical
axis rotation (
c
), and a rotation about the spin axis (
d
)
systems such that the
z
axis coincides with
the
apparent
position of the Earth's spin axis as
determined by a paleomagnetic pole. Therefore,
these frames differ each other on the basis of how
the longitude of a reference point on the root plate
changes with respect to the present day value.
Clearly, this definition requires a characteriza-
tion of longitudes that is independent from plate
motions, which leads us to abandon the familiar
concept of angular distance from the Greenwich
meridian.
zero. This means that the reconstruction matri-
ces obtained from these entries are immediately
total
reconstruction matrices, which transform
a plate from the present day position to the
absolute
position occupied at an assigned time
T
in a
paleotectonic
reference frame. Here, we
are going to discuss some methods to set up
a paleomagnetic frame of reference, which is
a common kind of paleotectonic frame, using
paleomagnetic frames are geocentric coordinate