Image Processing Reference
In-Depth Information
8.3.2
Edge Detection
An edge in an image is seen as a significant variation in the intensity of pixels
in the image at a specific position. Some of the standard edge detectors in image
processing include Susan, Sobel and Canny [26]. Since edges are local variations,
CA are suited to finding edges, as differences in neighbourhood pixels values are
easy to detect. Edge detectors can also thin the edges, to give a sharper edge result.
The method proposed by Popovici et al. [27] gives a standard edge detection CA
model. Let
ϕ
(
a
,
b
)
give a similarity measure between pixels
a
and
b
, such that the
value of
ϕ
(
a
,
b
)
decreases as the similarity between the pixels increases (this implies
that
ϕ
(
a
,
a
)=
0). A simple example of such a similarity measure is the Euclidean
distance
is defined, which can
differ according to the application. A Von Neumann neighbourhood is sufficient for
edge detection, and one simply needs to test whether the center cell differs more
than the specified threshold from each of its neighbours. If so, the center cell is set
to zero (the background colour):
||
a
−
b
||
in RGB space. In addition, a threshold
ε
⊨
⊩
0
,
if
ϕ
(
x
i
,
j
(
t
)
,
x
i
,
j
−
1
(
t
))
<
ε
& ϕ
(
x
i
,
j
(
t
)
,
x
i
,
j
+
1
(
t
))
<
ε
&
x
i
,
j
(
t
+
1
)=
ϕ
(
x
i
,
j
(
t
)
,
x
i
−
1
,
j
(
t
))
<
ε
& ϕ
(
x
i
,
j
(
t
)
,
x
i
+
1
,
j
(
t
))
<
ε
x
i
,
j
(
t
)
,
otherwise.
(8.3)
Note that, as with other non-CA edge detectors, a noisy image may result in false
edges, and it is essential to remove as much noise as possible from the image before
attempting to detect edges.
Many variants on the basic edge detection CA model exist. For example, Sato
and Kanoh [30] propose rule-changing CA, which are trained on the ground truth
established by using the Canny edge detector.
Finding the best rule set for edge detection has been investigated by, amongst
others, Slatnia and Kazar [16], and Rosin [29]. See chapter 5 for a more detailed
overview and comparison of CA edge detectors.
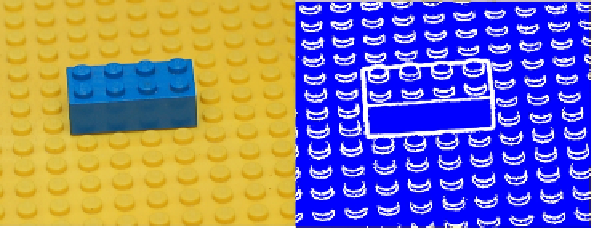
Fig. 8.2
Edges detected with the Popovici CA edge detection model (from [2])


Search WWH ::

Custom Search