Image Processing Reference
In-Depth Information
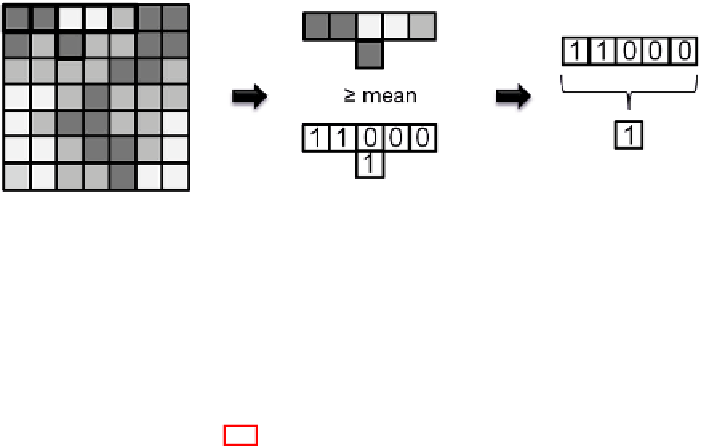
Fig. 6.7
Rule generation using 1D CA
neighbourhood. Note that Sun et al.'s method contains a step of neighbourhood
selection, but we can simply ignore it because we have a fixed neighbourhood
for each pixel.
The result of this process is a subset of rules for every block in the image that
describes the block's texture and is used as a feature vector to distinguish copied
areas in the image. Figure 6.7 shows generation of one rule for one neighbourhood
in 7
7 block of the image. Neighbourhood of 5 pixels from one row of the image is
used for learning pixel
p
c
. Intensity values of all pixels from the neighbourhood and
pixel
p
c
are used for calculation of mean value and thresholding of pixels intensities
to binary values. After thresholding binary values of neighbourhood pixels are used
for learning binary value of pixel
p
c
.
The use of neighbourhood of size
k
gives total of
N
s
possible rules, which leads
to even higher number of possible subsets of those rules
N
ss
, according to equation
(6.8). Thus, number of neighbourhood pixels should be selected considering the
computational time and the accuracy of texture description.
×
2
2
k
2
N
s
N
ss
=
=
(6.8)
Figure 6.8 shows a few examples of plain CMF detection on images from the
CoMoFoD database [24]. A block size
b
of 32
32 pixels is used, and neighbour-
hood size
k
is set to 7. Values of thresholds are defined as follows:
T
s
=0and
T
d
=1.5
×
b
= 48 pixels. The only pre-processing is just for conversion of RGB im-
ages into greyscale images, and no post-processing is used (for example, removal of
falsely detected areas). Detection is very accurate under different conditions, such
as presence of homogeneous regions (Fig. 6.8a) or complex textures (Fig. 6.8b).
Detection is less accurate in conditions where many areas have very similar prop-
erties, for example, areas with very small differences of pixels values. Figures 6.8c
and 6.8d show two examples of images where part of the area includes sky and
homogeneous regions with very similar values. Beside detection of copied regions,
much false detected area is also present, so detection in those cases is not satis-
factory. The problem is caused by very small differences between pixels values so
that in the thresholding process all blocks have very similar binary representations
resulting in similar sets of rules.
×




Search WWH ::

Custom Search