Image Processing Reference
In-Depth Information
back
ground
end
end
end
end
end
back
ground
edge
end
edge
end
end
Fig. 5.1
1D CA rules for extending open ends for edge linking. The rules use a 1
×
3pixel
neighbourhood containing pixel labels:
edge
,
end
,
background
.All45
ⓦ
rotated versions
are also required.
5.5
Experiments
In this section we show results of applying several cellular automata edge detection
methods. We start with Rosin's [34] method; the original training data was a 750
×
750 image mosaic containing sub-images from the University of South Florida data
set which contains images along with manually generated ground truth edges; see
figure 5.2. Note that in this chapter all edge maps are inverted for display purposes.
Since there is likely to be some positional error in the ground truth edges (which are
one pixel wide) the target edge map was dilated twice, with the new edges set each
time to an increasingly lower intensity.
The CA rules were tested on four independent images, not included in the training
data (figure 5.3), and produced the results shown in figure 5.4. The cellular automa-
ton converged after a single iteration of the single rule. It can be seen that the results
are fairly similar to the Sobel edge maps.
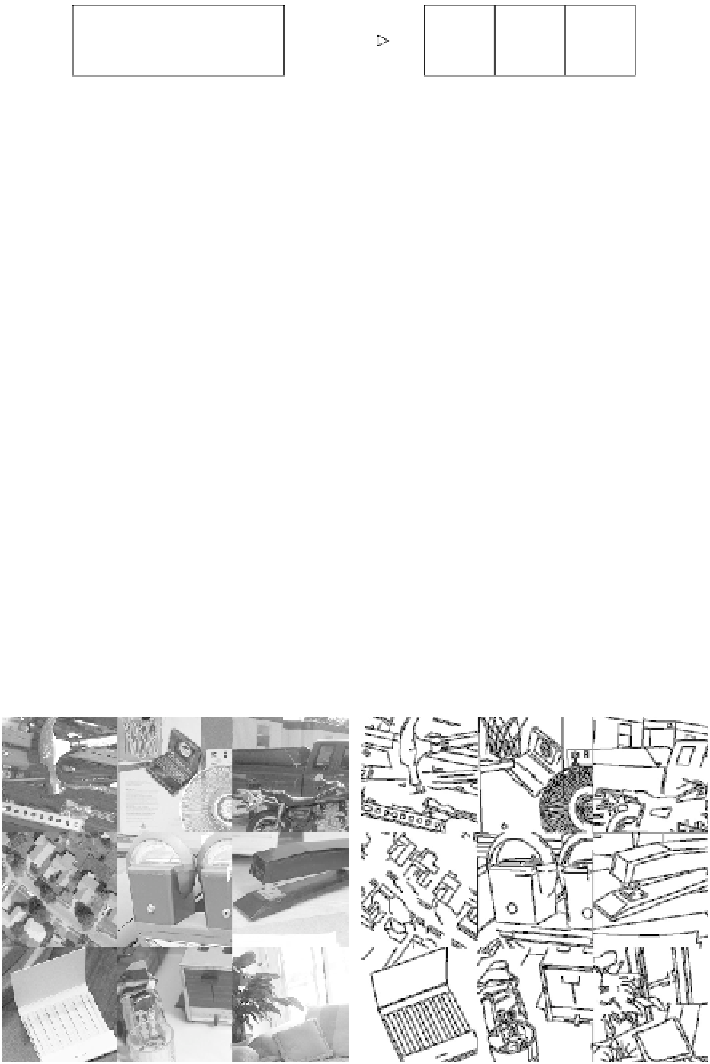
a
b
Fig. 5.2
USF training data: (a) input image, (b) target ground truth image (inverted for display
purposes)










Search WWH ::

Custom Search