Biology Reference
In-Depth Information
E
XERCISE
1-8
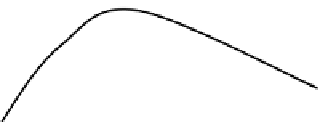
(a) For the logistic model (1-12), we had
dP
P
P
K
dt
¼
a 1
¼
a
K
ð
a
0
ð
where a
0
¼
K
P
Þ
P
¼
K
P
Þ
P
;
a/K. So in the example
a
0
(K-P)P. The graph of f (P)
is shown in Figure 1-13. Classify the equilibrium states for the
logistic model as stable or unstable.
(b) Suppose
dP
¼
discussed above, f (P)
dt
¼
f
ð
P
Þ
and the graph of f (P) is shown in Figure 1-14.
(i) Locate the equilibrium points, and classify them as stable or
unstable.
(ii) Sketch the trajectory P(t), as in Figure 1-8, for P(0) in the
following regions (i.e., P(0) <p
1
; p
1
<P(0) <p
2
; p
2
< P(0) < p
3
;
P(0)
>
p
3
).
(c) Suppose
dP
dt
¼
ð
Þ
and the graph of f (P) is shown in Figure 1-15.
Describe what happens if P is close to the equilibrium point p
1
.
f
P
So far, we have only considered questions related to population
growth. The techniques described, however, are quite general and can be
used to answer a variety of questions related to quantities that change
with time, as the following examples illustrate.
dP
f
(
P
)
=
dP
f
(
P
)
=
dt
dt
0
P
P
0
K
p
1
p
2
p
3
FIGURE 1-13.
The graph of f(P) ¼ dP/dt versus P for the logistic Eq. (1-12).
FIGURE 1-14.
A model with three equilibrium states.
dP
f
(
P
)
=
dt
0
P
p
1
FIGURE 1-15.
A model with one equilibrium state that never decreases.