Environmental Engineering Reference
In-Depth Information
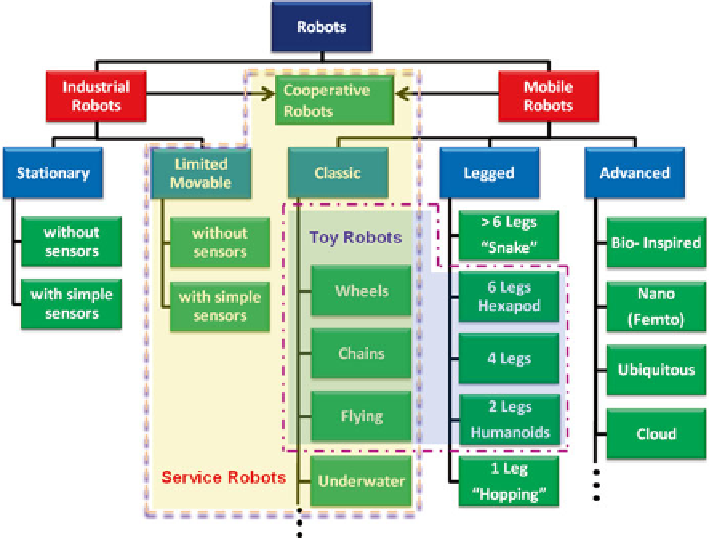
Fig. 3.2
Robots (Kopacek
2013
)
This requires the robot to have sensors. They should be inexpensive to reduce over-
all costs and have high accuracy and reliability to ensure high-quality information
which is always available. There are three main starting points for the development
of intelligent robots: (1) conventional, stationary industrial robots; (2) mobile,
unintelligent robot platforms; and (3) legged robots or walking mechanisms
(see Fig.
3.1
). For instance, many stationary industrial robots have been equipped
with simple external sensors for 'intelligent' operations such as assembly and
disassembly and fuelling cars, making them 'intelligent', as shown in the left two
columns of Fig.
3.2
.
One of the current trends in robotics is cooperation. This involves the connection
and synchronisation of (industrial) robots by their controllers or the control of a num-
ber of robots by one controller. There is potential for intelligent robots, particularly
intelligent mobile platforms and humanoid robots, to work together on a common
task or tasks in a cooperative way. The goal is so-called multi-agent systems in which
several agents interact in an attempt to jointly solve tasks or maximise utility (Panait
and Luke
2005
). A robotic multi-agent system consists of several different robots
(agents), equipped with various devices, such as arms and grippers to carry out activ-
ities and a host computer to coordinate them (Kim et al.
1997
). The host computer
divides the task into a number of subtasks of appropriate size to be carried out by one
agent. Other developments involve modular metamorphic or reconfi gurable robots of
Search WWH ::

Custom Search