Environmental Engineering Reference
In-Depth Information
a
b
c
4
4
4
3
3
3
2
2
2
1
1
1
0
0
0
0
1
2
3
4
0
1
2
3
4
0
1
2
3
4
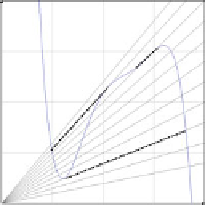
Fig. 6.14 The isoclines were obtained for (6.23) with different parameter. (a) A system with three
alternative equilibria and four transitions between them (A
¼
2.0, P4
¼
10.0, P3
¼
38.0975,
P2
18.585).
B
should range upwards and downwards between
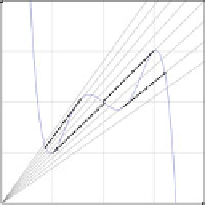
0.5 and 2.0. (b) A system with three alternative equilibria but only three transitions between them
was obtained for A
¼
68.585, P1
¼
58.0725, P0
¼
43.848.
B
should range upwards and downwards between 0.5 and 3.0 In one direction, there is one
transition, the reverse goes in two distinct steps. (c) A system with three alternative equilibria
but only two transitions were obtained using the parameter A
¼
1.2, P4
¼
11.5, P3
¼
51.38, P2
¼
110.636, P1
¼
113.604, P0
¼
¼
3.5, P4
¼
10.0, P3
¼
38.99,
P2
23.94. B should range upwards and downwards between 0.5 and
3.0. The trajectory starting at the initial conditions
N
1
¼ N
2
¼
2.04 exhibits a damped oscillation
approaching an equilibrium at
N
1
¼ N
2
¼
2.0
¼
73.94, P1
¼
67.89, P0
¼
Figure
6.14a
shows a parameterization where four transitions occur. Figure
6.14b
demonstrates a parameterization of (
6.23
) where in one direction there are two
transitions between different equilibria, whereas in the other direction there occurs
only one. Figure
6.14c
shows a situation where a central stable branch is fully
masked as the system jumps over it when transiting between alternative states. This
central “hidden” stable branch would become apparent only when using initial
conditions which are close to this equilibrium when
b
is set to 1.0.
When more complex nonlinearities are involved, we have seen, that hysteresis
effects are not only limited to transitions between two alternative equilibria.
Therefore, when modelling partially unknown contexts, we need to be sufficiently
cautious, whether there are previously unobserved nonlinearities as these could lead
to hysteresis effects.
6.6.3 The Crucial Role of Phase Transitions and Initial
Conditions
If there are multiple stable states in a model, normally only one becomes
directly apparent. The part of the phase space from which a particular equilib-
rium is approached, is called
domain of attraction
, or sometimes also
basin of
attraction.
In its basic form, the Lotka-Volterra system is a marginal case. As long as
positive parameters are used, in principle the type of behaviour is always the