Chemistry Reference
In-Depth Information
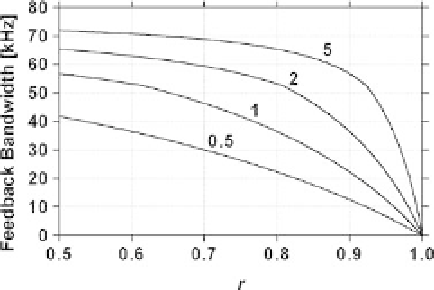
Figure 12.2 Dependence of the amplitude set point on the
feedback bandwidth of tapping mode AFM. The number attached
to each line is the ratio of the cantilevers peak-to-peak oscillation
amplitude to the sample height. This dependence is theoretically
derived.
Parachuting occurs when the maximum height of the residual topography, h
0
sin
(
/2), is larger than the difference between the cantilevers peak-to-peak free
oscillation amplitude and the set point amplitude,
j
i.e. h
0
sin(
j
/2)
>
2A
0
(1
r).
An analytical expression for the parachuting time has been derived [6]:
t
½
ð
tan
b
Þ=b
1
=
f
c
ð
12
:
5
Þ
p
is cos
1
[2A
0
(1
where
/2)], and the feedback gain is set to a level
at which an error signal corresponding to the separation distance, 2A
0
(1
b
r)/3h
0
sin(
j
r),
diminishes roughly in a single period of the cantilever oscillation. For example, for
h
¼
4A
0
, r
¼
0.9,
j¼p
/4, and f
c
¼
1MHz,
t
p
is estimated to be 1.21
m
is which
signi
cantly reduces the feedback bandwidth.
The main component of PID control is integral. It is dif
cult to estimate
theoretically the integral time constant (
t
I
) with which the optimum feedback control
is attained. We obtained experimentally
/8)/A
0
f
c
. The feedback band-
width as a function of the set point, r, and 2A
0
/h
0
is shown in Figure 12.2.
t
¼
4h
0
sin (
p
I
12.5
Key Devices for High-Speed AFM
Equations 12.3 and 12.4 give us a quantitative guideline for developing a high-speed
tapping mode AFM. In order to achieve high-speed AFM, we need the following
devices and techniques: small cantilevers with a high-resonant frequency and a small
spring constant, a fast amplitude detector, a sample stage scanner with high resonant
frequencies, active damping techniques for reducing the quality factor of the scanner,
and a technique to minimize the parachuting time. In addition, we have to optimize
the optical lever method for detecting de
ection of a small cantilever.