Environmental Engineering Reference
In-Depth Information
The complete code is included in the accompanying software under the
name
'GdDTPA.m'.
Figure
7.3
depicts the result of the computation labelled
by 'n
¼
2'. Estimated parameter values for
b
and
were adopted from
Holzbecher et al. (
2005
).
Additionally, Fig.
7.3
depicts the result of another model run in which the
parameter
n
was included in the estimation. For the solution, the steady state
equations (
7.21
) were modeled using a MATLAB
solver for ordinary
differential equations (see Chap. 9). The optimum fit was obtained for
n ¼
®
1.029,
b
¼
16.2 and
¼
5425. How parameter estimations can be
performed in core MATLAB
is shown in Chap. 10.
The second run obviously represents much better the curvature in the
observed data than the first run. A more detailed model may even improve
the fit, i.e. the correspondence between measured and modelled data. Also the
approaches (
7.13
) and (
7.14
) deliver better results than the run with a fixed
n ¼
®
2 (Holzbecher et al.
2005
). Which of the approaches is more realistic can
only be judged by including non-mathematical findings of the applied
sciences.
60
sampling port
0.22 m
10 m
20 m
30 m
50
40
30
20
10
0
0
7
14
21
28
35
42
49
56
63
70
77
days after tracer input
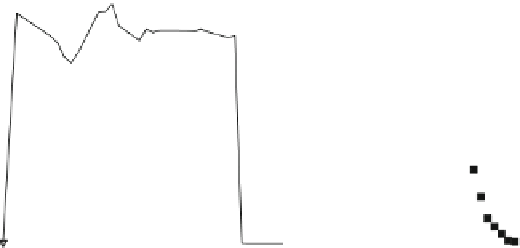
Fig. 7.2
Observed breakthrough curves (selected) in Gd-DTPA column experiment