Information Technology Reference
In-Depth Information
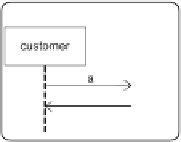
In a nutshell, for each definition of
apartofabSD
, there is a corresponding
definition of join point. In Fig. 7, if we consider the
pointcut
depicted, it is easy
to see that the messages
2areajoinpointifwetaketheenclosed
part, the safe part or the general part as definition of part of a bSD, because
there exists a bSD isomorphism between the pointcut and an enclosed part, a
safe part or a general part of
m
1and
m
M
2.
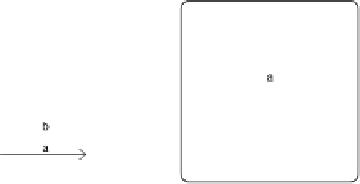
3.3
Successive Join Points
To define the notion of successive join points the simple definition of join point
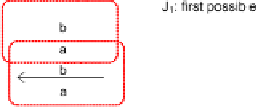
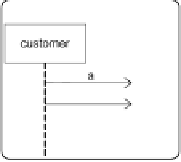
is not precise enough. Indeed, in Fig. 8, the pointcut
P
1 matches two different
parts of
M
1, but these parts become entangled. Let us consider now the pointcut
P
2. If we take the definition of general part as the definition of
part, there are four possible join points. Indeed, the first message
2 and the bSD
M
a
and the first
message
b
can form a join point, as can the second message
a
and the second
message
b
, but the first message
a
with the second message
b
or the second
a
b
message
with the first message
can also form join points.
Fig. 8.
Multiple possible matching
These multiple conflicting join points pose a problem. Among the conflicting
join points, which should be chosen? Considering all these potential join points
might not make sense from the point of view of someone using aspect weaving
tools. In practice, we can reasonably expect that when a join point is detected,
no elements of this join point can be used to form another join point. Roughly
speaking, we can define successive join points as a set of disjoint join points
taken in sequence.























Search WWH ::

Custom Search