Image Processing Reference
In-Depth Information
N
j
=1
U
j
φ
0
j
0
j
φ
(
)=
(
)
u
x
x
.
−
+
+
j
1
j
j
1
j
2
Stückweise lineare Interpolation.
Die stückweise lineare Interpolation ist der klas-
sische Interpolationsansatz. Zwischen den Gitterpunkten werden die Bilddaten linear
fortgesetzt. Dies entspricht auch der Interpolation mit Splines erster Ordnung. Wir de-
finieren den Vektorraum
R
u
ist stetig ,
u
V
1
=
{
u
:
[
1,
N
]
→
|
[
j
,
j
+1[
ist linear für
j
=
1, . . . ,
N
−
1
}
.
1
j
1
(
)=
(
)=
Eine Basis dieses Vektorraums sind offensichtlich die
Hutfunktionen
φ
x
T
φ
x
−
j
1
φ
(
x
−
j
)
mit:
⎨
x
+
1
falls
x
∈
[
−
1, 0
[
1
(
)=
φ
x
1
−
x
falls
x
∈
[
0, 1
[
⎩
0
sonst.
Die stückweise lineare Interpolation von
U
lässt sich damit schreiben als:
N
j
=1
U
j
φ
1
j
φ
1
j
(
)=
(
)
u
x
x
.
−
+
+
j
1
j
j
1
j
2
Weitere Interpolationsfunktionen.
Man kann zur Interpolation im Prinzip jede be-
liebige interpolierende Funktion
φ
benutzen. Wir nennen eine Funktion
φ
:
R
→
R
Interpolationsfunktion
, falls
⎧
⎨
=
1
falls
x
0
φ
(
x
)=
∈
\{
}
0
falls
x
Z
0
⎩
beliebig
sonst.
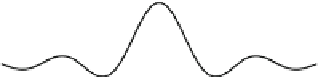
Eine Funktion, die in Abschnitt 4.2.2 eine wichtige Rolle spielen wird, ist die sinc-
Funktion:
sin
(
π
x
)
π
falls
x
=
0
x
sinc
(
x
)=
0.
-4 -3 -2 -1 0 1 2 3 4
Analog zur Nearest-neighbor- und bilinearen Interpolation erhalten wir eine Inter-
polationsvorschrift
1
falls
x
=
N
j
=
1
U
j
T
−j
sinc(
x
).
(
)=
u
x