Database Reference
In-Depth Information
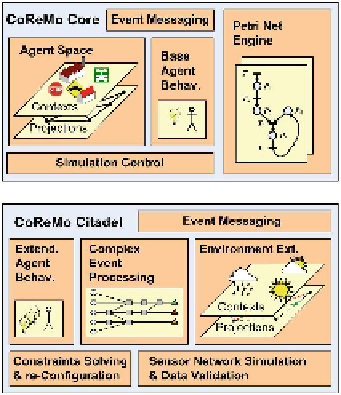
Fig. 3.
CoReMo emulator architecture.
CoReMo Citadel
complements
CoReMo Core
with urban trac simulation
and specialized components for autonomic behavior. It adds extensions to the
agent behaviors and to the simulated environment and introduces dedicated pro-
cessing components such as those for CEP or CS (C
onstraints
S
olving
) techniques.
While the former two extensions are closely related to the
monitoring
step of
the MAPE loop, the latter ones are related to the
analysis
and
planning
steps,
respectively, which will be described later.
4.2 MAPE-K Loop Monitor Step
Figure
4
presents the interface of the CoReMo emulator, which was configured
according to the considered scenario. The image shows the Repast Simphony
framework running the emulation and displays the trac network for the city of
Brasov (the roads and the infrastructure elements), the simulated vehicles and
the thermal map.
In addition to the minivan agents belonging to the transport company, the
emulation environment has several car agents, which are used for generating the
trac load.
As mentioned in the previous section, the CoReMo emulator is able to simu-
late temperature, humidity and atmospheric pressure variation in the city (the
emulator generates maps so that they mimic the dynamics of weather throughout
the simulation).
The following IoT devices are deployed in the emulator:
- loop detection based on speed sensors that allows detection of a car's speed;
- loop detection sensors which are placed at the entry and at the exit of a road
segment (used for counting the number of cars in that particular area);
Search WWH ::

Custom Search