Image Processing Reference
In-Depth Information
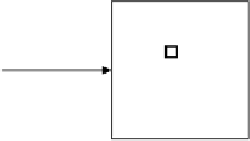
Input image
x
3
x
4
x
1
x
2
Divide into
blocks
i
th
block
x
N
Input vector
X
Codebook
min||
X
-r
i
||
r
1
,
r
2
, …,
r
L
Encoder
i
= 1, 2, …,
L
index
i
Codebook
r
1
,
r
2
, …,
r
L
Lookup table
Output vector
r
i
=
[
r
i
1
,
r
i
2
, …,
r
i
N
]
r
i
4
Compressed image
r
i
1
r
i
2
r
i
3
Reconstructed
i
th
block
r
i
N
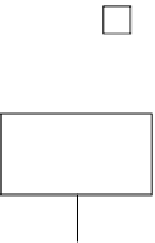
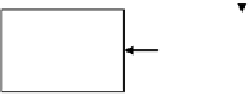
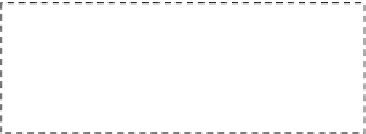
FIGURE 2.20
Encoder and decoder for VQ-based image compression technique.
into a vector. These vectors are input to the encoder. The encoder will compare each
input vector with every codevector in the codebook and output an index correspond-
ing to the minimum distortion codevector from the codebook. The decoder will use
this index to pick the corresponding codeword from the codebook and generate the
output vector. These output vectors are used to reconstruct the compressed image.
The encoder and decoder for a VQ image data compression system are shown in
Figure 2.20.
2.5 IMAGE TRANSFORM
There are different transforms that can be used in image processing. The most
common transforms are discrete Fourier transform (DFT), discrete cosine transform
(DCT), discrete Hadamard transform, and Karhunen
Loeve (KL) transform [9
12].
-
-
2.5.1 T
WO
-D
IMENSIONAL
D
ISCRETE
F
OURIER
T
RANSFORM
The 2-D DFT provides an expansion of N
M samples of a discrete 2-D sequence in
terms of discrete sine and cosine signals, in much the same way as a continuous








































Search WWH ::

Custom Search