Image Processing Reference
In-Depth Information
without a Smith predictor gives an overshoot (not shown in the
figures). This is
because of the integral part of the controller. By including the Smith predictor,
the overshoot due to time delay has been reduced, but the sensor noise can give
rise to increased steady-state error, meaning the
final TC will not be equal to what
was requested (in this case 4%). But the state feedback gives reduced steady-state
error under those noise uncertainties. The state feedback technique works well
because the output is fed back to a number of states instead of just one as in PI
controller. All states are estimated and controlled, thus, the error correction is
more favorable with state feedback.
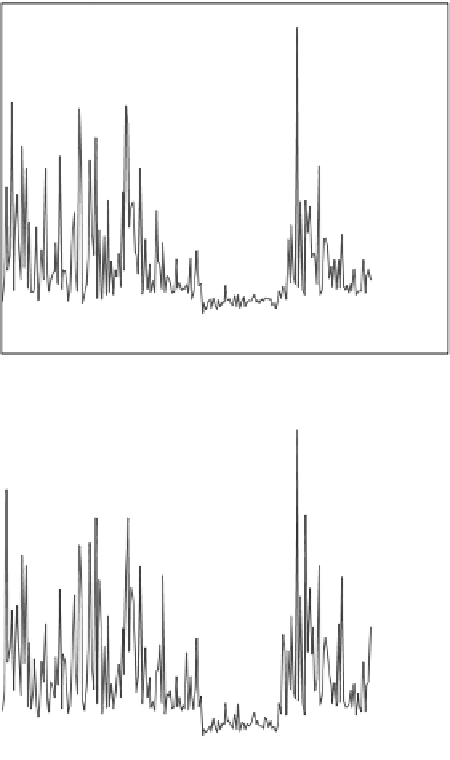
In Figure 9.48, we show the area coverage disturbances expected from a sample
print job. Clearly it appears as noise without any structure. Figure 9.49 shows an
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
50
100
150
200
250
Print number,
k
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
0
50
100
150
200
250
(a)
Print number,
k
FIGURE 9.48
Area coverage profile used for the TC control algorithm (obtained using a
scanner from magazine samples).
(continued)







































































































Search WWH ::

Custom Search