Image Processing Reference
In-Depth Information
m
i
(
k
)
Feedforward
compensator
Actuator
saturation
TC output
y
(
k
)
x
target
Open loop
TC
system
Target state
decomposer
+
_
ˆ
target
(
k
)
TC target
t
d
(
k
)
State estimator
Gain
matrix
ˆ
1
(
k
)
ˆ
2
(
k
)
K
c
ˆ
μ+1
(
k
)
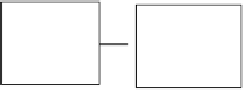
FIGURE 9.40
Block diagram of open-loop TC model with state estimator and state
controller.
2
4
3
5
2
4
3
5
100
0
2
4
3
5
x
1
(
k
)
x
2
(
k
)
.
x
mþ
1
(
k
)
g
0
.
0
100
0
010
0
x
(
k
) ¼
,
A
¼
,
B
¼
and
.
.
.
.
.
00
10
C
¼
½
(
:
)
00
01
9
101
This state-space equation is used to develop the state feedback estimator and state
feedback controller as follows.
The block diagram of the closed-loop TC control system with state estimator
and state controller is shown in Figure 9.40. The states of the open-loop TC
system can be estimated using a Kalman
filter (an optimal observer) or a linear
full-order observer (a suboptimal observer). A full-order observer (Section 5.4.2)
[41], Equation 9.102, with K
0
as the observer gain is considered as the state
estimator.
x
(
k
þ
1
) ¼
Ax
(
k
) þ
Bu
(
k
) þ
K
0
y
(
k
)
Cx
(
k
) þ
x
mþ
2
(
k
)
(
9
:
102
)































Search WWH ::

Custom Search