Image Processing Reference
In-Depth Information
v
(
z
)
G
p
(
z
)
_
+
G
(
z
) =
G
p
(
z
)
z
-μ
u
(
z
)
t
c
(
z
)
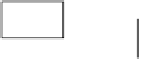
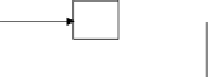
FIGURE 9.30
Open-loop transfer function of TC control system.
g
z
z
m
u
(
z
)
v
(
z
)
t
c
(
z
) ¼
ð
Þ
(
9
:
65
)
1
or
z
m
u
(
z
)
v
(
z
)
t
c
(
z
) ¼
G
p
(
z
)
ð
Þ
(
9
:
66
)
where G
p
(z)
¼
g
=
(z
1). The block diagram of the open-loop TC system of Equation
9.66 is shown in Figure 9.30.
Clearly, the open-loop TC system becomes unstable if the developed mass v(k)is
zero, this condition occurs when the developer housing is being cycled to
ll the
toner without printing images. The system of Equation 9.66 contains an integrator
and a time delay. For now, if we ignore the time delay, then a simple proportional
integral (PI) controller can be used to stabilize the system.
9.11.2 D
ESIGN OF A
TC C
ONTROL
L
OOP
U
SING A
PI C
ONTROLLER
Pole-placement design is applied to bring the TC from the initial state to the desired
state in few cycles. Note that the TC sensor model is ignored in this design.
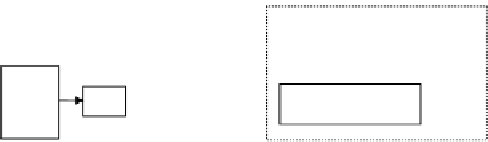
Figure 9.31 shows the PI controller in the z-domain. It is important to note that a
simple integral control (i.e., with K
p
¼
0) will give stable performance provided the
gains are designed correctly. The parameter
u(z)
¼
u(z)
=t
represents the rate of toner
dispense and
is the TC measurement-process-actuation interval in seconds. The
intermediate quantity, w(z), and the error signal, e
s
(z), are related by the following
transfer function:
t
G
pi
(
z
)
K
p
v
(
z
)
G
p
(
z
)
w
(
z
)
t
d
(
z
)
_
+
z
t
c
(
z
)
+
+
K
i
G
(
z
) =
G
p
(
z
)
z
-μ
+
τ
z-
1
+
+
~
(
z
)
e
s
(
z
)
-
PI controller
u
(
z
)
Plant
FIGURE 9.31
TC feedback system with PI controller.







































Search WWH ::

Custom Search