Image Processing Reference
In-Depth Information
-70
8
-75
7.5
-80
7
-85
6.5
-90
6
-95
5.5
-100
5
-105
0
2
4
6
8
10
12
14
0
2
4
6
8
10
12
14
Print number
Print number
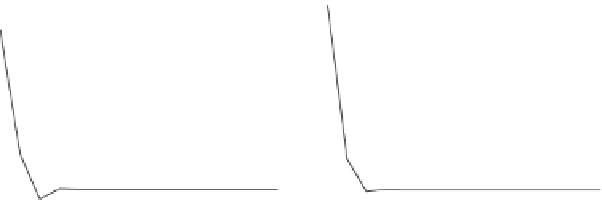
FIGURE 9.10
Convergence plot of V
1
and actuator X(U
l
) as a funtction of print number for a
one pitch photoconductor with dark decay of 30 V at the exposure station.
Example 9.4
Let the charge on the photoconductor at the exposure station be decayed by 30 V
(i.e., V
h
at the exposure station is equal to
30 V). Simulate the transient
performance of the controller shown in Example 9.3.
550
þ
S
OLUTION
V
h
and V
g
plots do not change. Vl
l
has the desired
final value, whereas the starting
value is different because the photoconductor was charged to a lower potential due to
dark decay. X has the same starting value but a different
final value when compared to
Example 9.9. Interestingly, the electrostatic control system is automatically able to
maintain the photoconductor voltages to the desired target (Figure 9.10).
It is interesting to note, at this point, that all the pole-placement algorithms
are designed for continuous-time linear systems of the form shown in Equation 9.2a.
In the next section, we show that they are equivalent to pole-placement techniques
for the discrete model Equation 9.2b which is being used extensively in this study.
Note that it is known from linear system theory that for arbitrary pole placement to be
possible, a necessary and suf
cient condition is controllability, which in our case
reduces to the simple condition that the Jacobian matrix (at a nominal operating point)
has full rank.
9.5 STATE SPACE TO TRANSFER FUNCTION CONVERSIONS
In this section, we demonstrate how to transform a system from state space to transfer
function form. The system is assured to be LTI. This is done for both continuous and
discrete-time systems using the Laplace transform (s-domain) and z-transform,
respectively. The result is well known, particularly for the continuous-time case,
but the motivation of this exercise is to prove that pole-placement algorithms for
both cases have an identical form. Of course, we know from linear system theory






















































































































































Search WWH ::

Custom Search