Image Processing Reference
In-Depth Information
Run
N
t
iterations of
control algorithm
1
Initialize
c
=1
(Start with first color)
2
Select (
CMY
)
c
,
i
*
i
*
=
i*=arg mini
i
{Δ
E
2000
c
,
i
},
i N
t
3
4
N
c=c+
1
c>N
c
Y
End
(a)
1
,
2
, …, N
t
N
t
+
1
N
t
+
2
Set used for best CMY
Set used for best CMY
Set used for best CMY
(b)
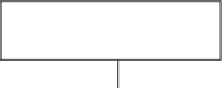
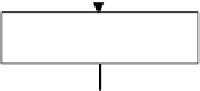
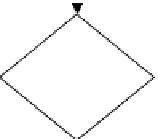
FIGURE 7.32
(a) Best CMY selection flow diagram for node colors shown for N
t
iterations
and N
c
colors. (b) Best CMY selection progression for control-based algorithm shown for N
t
iterations and beyond.
first color for the analysis. The third block seeks CMY values for each color c that
generated the minimum
D
E value across all N
t
iterations. The selected CMY values
are stored. The fourth block checks whether all colors considered in the algorithm have
already been analyzed. If so, the selection algorithm stops and the best CMY values
selected will be used for the respective node colors. Otherwise, the algorithm con-
tinues the process for the next color in the list. Thus the best actuator algorithm selects
the best CMY that leads to minimum
D
E convergence by assessing
D
E results across
all the iterations. An example is shown in Problem 7.7.
Linear state-feedback design also has other shortcomings such as not reaching
zero steady state error for colors near the boundary. These, and many other control
system-related shortcomings are overcome by using a multiplicity of gain matrices
per node color as opposed to single gain matrix.

















Search WWH ::

Custom Search