Image Processing Reference
In-Depth Information
7.5.2.2 Control-Based Inversion
We describe the control-based inversion for a linear three-input three-output forward
map or a printer. In this approach, a feedback control algorithm can be used at each
node to accurately convert the in-gamut L*a*b* nodes to CMY color space. Since
GCR is already embedded inside the augmented printer model (CMY to L*a*b*),
we do not have to constrain the control algorithm when compared to the control
approaches applied directly on a nonunique, CMYK to L*a*b* printer. The algorithm
iterates on the printer model (or the printer) for each in-gamut node by using the
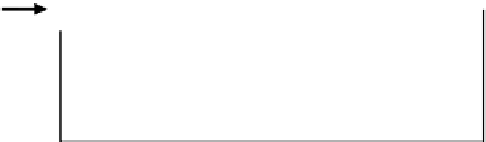
L*a*b* node as target. A block diagram shown in Figure 7.29 illustrates how
inversion operations are executed at a given L*a*b* node.
We show the use of linear multiple-input multiple-output (MIMO) state-
feedback controllers [95] to update the
ne the
inversion errors. The problem lies in the design of stable controllers for each of the
node colors, which is done by representing printer characterization data in a suitable
form such as the state variable form.
Considering the printer input
final CMY values that will further re
-
output characteristic as linear (which is generally
true at the nominal CMY values, see Figure 7.30), we
first develop a state space
model for the CMY to L*a*b* printer model (or the printer). After that, we design the
feedback controller for this system. In Section 8.6, a derivation of the linear
state space model is shown at the nominal CMY values for a node color whose target
L*a*b* values are given. This approach requires the use of nominal CMY values for
each node because of the use of linear state space form. However, these values
can come from any of the less accurate inversion algorithms described above
(e.g., output of the ICI algorithm). Thus, for an individual node color, the system
with the integrator in Figure 7.29 can be expressed in state space form as
x
(
k
þ
1
) ¼
Ax
(
k
) þ
Bu
(
k
)
(
7
:
87
)
where
x(k) represents the L*a*b* values from the printer model obtained at iteration k
A is an identity matrix
Feedback
controller
Initial CMY values
x
Augmented
printer model/
printer
Reference,
r
(
L*a*b*
)
K
Integrator
+
+
V
u
e
-
Measured
L
*
a
*
b
*
x
(
k+
1)
=Ax
(
k
)
+Bu
(
k
)
FIGURE 7.29
Closed-loop control algorithm with a gain matrix and an integrator as the
controller.

















Search WWH ::

Custom Search