Image Processing Reference
In-Depth Information
x
(
k
+1)
x
(
k
)
Unit
delay
B
+
u
(
k
)
+
A
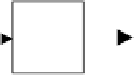
FIGURE 5.1
Block diagram of the open-loop control system.
x
(
k
+1)
x
(
k
)
u
(
k
)
Unit
delay
B
+
+
A
-K
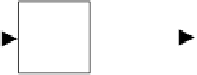
FIGURE 5.2
Block diagram of the closed-loop system with state feedback.
Using techniques described in Chapter 4, the solution to the closed-loop system
of Equation 5.3 is
k
x
(
x
(
k
) ¼ (
A
BK
)
0
)
(
5
:
4
)
Therefore, the states of the system will approach zero for any arbitrary initial
conditions if the eigenvalues of the closed-loop matrix A
c
¼
A
BK are inside the
unit circle in the complex z-plane. The feedback gain K is a vector for SISO system,
which can be designed to place the eigenvalues of the closed-loop system inside the
unit circle even if the original open-loop system is unstable or does not give an
acceptable transient response. The following example illustrates this concept.
Example 5.1
Consider an open-loop control system given by the following state equation:
x(k)
u(k)
0
1
0
1
x(k þ
1)
¼
þ
(5
:
5)
0
:
72 1
:
7




























Search WWH ::

Custom Search