Image Processing Reference
In-Depth Information
Im(
z
)
Poles of
X
(
z
)
e
j
ω
0
Re(
z
)
e
-j
ω
0
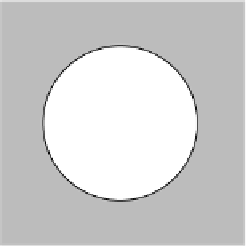
FIGURE 3.3
ROC for Example 3.11.
Example 3.11
Consider the sequence x(n)
¼
cos (
v
0
n)u(n). The z-transform of this sequence is
¼
1
n¼1
¼
1
n¼
5
1
n¼
x(n)z
n
v
0
n)z
n
(e
jnv
0
þ e
jnv
0
)z
n
X(z)
cos (
¼
0
:
0
0
5
1
n¼
5
1
n¼
(e
jv
0
z
1
)
n
(e
jv
0
z
1
)
n
¼
0
:
þ
0
:
(3
:
45)
0
0
If
je
jv
0
z
1
j <
1 and
je
jv
0
z
1
j <
1or
jzj >
1,
the sums in Equation 3.45
converge and
1
1
5z
z e
jv
0
þ
0
:
5z
z e
jv
0
0
:
X(z)
¼
0
:
5
e
jv
0
z
1
þ
0
:
5
e
jv
0
z
1
¼
1
1
z(z
cos
v
0
)
¼
(3
:
46)
z
2
2 cos
v
0
z þ
1
The ROC of X(z) is the set of points outside the unit circle, as shown in Figure
3.3. The function X(z) has two complex conjugate poles at p
1
¼ e
jv
0
and
p
2
¼ e
jv
0
. These poles are outside ROC of X(z). In general, any discrete-time
sequence, which is the linear combination of exponential functions, has
a z-transform, which is the ratio of two polynomials in z (rational function).
These polynomials can be represented by a constant gain, a set of poles,
and zeros.
Example 3.12
¼ a
jnj
, where 0
Consider the sequence x(n)
< a <
1. Find the z-transform of the
sequence.









Search WWH ::

Custom Search