Image Processing Reference
In-Depth Information
N
M
ˆ
g
(
n
.
m
)
0
N
M
0
0
ˆ
g
(
n
,
m
)
Zero
padding
N × N
FFT
g
(
n
,
m
)
w
(
n
,
m
)
Uniform
sampling over
N × N
grid
W
(ω
x
, ω
y
)
N
f
ˆ
(
n
.
m
)
N × N
IFFT
N
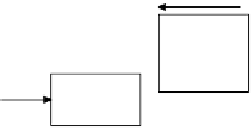
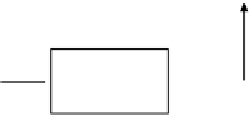
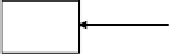
FIGURE 2.50
FFT implementation of the Wiener filter.
This is called inverse
filter. If there is no degradation except for additive noise, that
is, H
(v
x
,
v
y
) ¼
1, then
1
W
(v
x
,
v
y
) ¼
(
2
:
139
)
S
N
(v
x
,
v
y
)
S
f
(v
x
,
v
y
)
1
þ
This is the Wiener
filter for noise removal. In practice, the noise and the image power
spectra are not known and the ratio
S
N
(v
x
,
v
y
)
S
f
(v
x
,
v
y
)
is replaced by the constant
a
.
H*
(v
x
,
v
y
)
W
(v
x
,
v
y
) ¼
(
2
:
140
)
2
H
(v
x
,
v
y
)
þa
The constant
is a measure of noise power to image signal power (inverse of
SNR). It is generally chosen by trial and error. The Wiener
a
filter is normally
implemented in frequency domain using the FFT algorithm. The block diagram of
FFT-based implementation of the Wiener
filter is shown in Figure 2.50.
As indicated in Figure 2.50, the blur frequency response is sampled and multi-
plied by the FFT of the zero-padded and windowed input image. The window
w
(
n, m
)
is a separable 2-D window given as product of two 1-D windows.
w
(
n, m
) ¼
w
1
(
n
)
w
2
(
m
)
(
2
:
141
)
Example 2.20
The LENA image is blurred by a 5
filter and white Gaussian
noise is added to the resulting image. The original image is shown in Figure 2.51.
5 moving average






























Search WWH ::

Custom Search