Environmental Engineering Reference
In-Depth Information
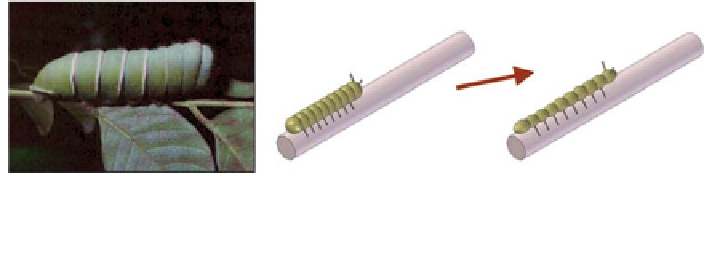
Fig. 11.6 The ability of a worm to shrink and extend its own body to propel itself forward has
inspired the creation of artificial counterparts that mimic this behavior (Balaguer et al.
2005
).
(Images provided courtesy of Springer)
For both cases, the geometry of the robot was related to the pipe radius (or
diameter), assuming that the centerline of the robot coincided with that of the pipe.
Therefore, information about the pipe diameter could be obtained directly for
SHM applications.
It should be mentioned that other climbing robots have also been developed.
Examples include the ROMA I that was inspired by the locomotion of caterpillars
that shrink and extend its body to move (Fig.
11.6
) (Balaguer et al.
2005
). Another
example is the ROMA II that utilized vacuum suction for climbing on different
surfaces (Balaguer et al.
2005
). In fact, the mobile sensor consisted of two arms
and 10 vacuum cups. By controlling suction on either arm and by moving and/or
rotating the unattached arm, motion could be achieved. Bio-inspired mobile sen-
sors continue to be an important area of research with commercial prototypes
emerging in the marketplace.
11.4 Skin-Inspired Sensors
The human skin is another prime example of an impressive biological system that
is capable of densely distributed sensing. The sensing and monitoring of changes
in temperature, deformation, flow, pressure, and damage (i.e., injuries) is achieved
by the 640,000 sensory receptors distributed throughout the entire system (Schmidt
1986
). Unlike mobile sensors that need to navigate to different locations and
collect data at different points in time, the skin is able to resolve changes
throughout the entire system simultaneously.
In fact, the skin has inspired the development of various tactile sensors, as have
been described in review articles by Lee and Nicholls (
1999
) and Yousef et al.
(
2011
). These tactile sensors are particularly important considerations for the
development of next-generation human-interactive robotic systems as an example
Mukai et al. (
2008
). In the context of SHM, Loh and Azhari (
2012
) have presented
a review of skin-inspired sensors.
Extensive research in flow sensors inspired by, for instance, human hairs and
the lateral line system in fish, has been conducted. Velocity-, acceleration-, or
Search WWH ::

Custom Search