Graphics Reference
In-Depth Information
(a)
(b)
(c)
Hummingbird + X2
Pelican + Core2Duo
Hummingbird + U2
0.1
0.1
0.1
0
0
0
-0.1
-0.1
-0.1
-0.2
-0.2
-0.2
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
y [m]
y [m]
y [m]
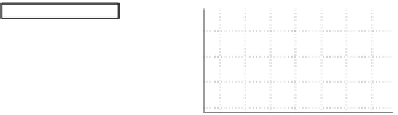
Fig. 4.4
Hover performance of the Pelican with Mastermind (
a
), the Hummingbird with a heavier
Odroid-X2 evaluation board (
b
), the Hummingbird with modified U2 (
c
)
4.2.4 Experimental Evaluation: Map Based
To evaluate the influence of the reduced weight on the control stability of the platform,
we executed a position hold maneuver with all three vehicle/flight computer con-
figurations, where the MAV was controlled only with position estimates from our
pose estimation software (the vision front end was again executed at a frame rate of
30 Hz).
Neglecting the influence of different flight performances of the two quadrotor
systems, the reduced gross weight resulted in significantly better control perfor-
mance: the hovering ellipse was reduced from
±
35 cm for the heavy Asctec Pelican
with Mastermind (RMS(x y z)
=
[8.3 cm 15.8 cm 1.5 cm]) to about
±
15 cm for the
Hummingbird with the X2 (RMS(x y z)
7cm for
the Hummingbird with the final stripped down version of the U2 (RMS(x y z)
=
[5.4 cm 5.7 cm 1 cm]) and to
±
=
[2.9 cm 3.0 cm 0.8 cm]) (Fig.
4.4
). Extensive tests in different environments were
done in [
63
].
4.2.5 Experimental Evaluation: Map Free
We showed in [
66
] that we can control the MAV with IOF drift free in metric velocity,
full attitude, and metric scene distance. Being able to keep the MAV constant in
heading and scene distance is crucial for automatic initialization of more powerful
algorithms (e.g., VSLAM) to control the vehicle in full 6DoF pose. Our IOF approach
is sufficiently robust to estimate the vehicle pose even in drastic motion as it occurs
when tossing the MAV in the air.
We start our IOF-based state estimation at
t
42. The 4 s of
“initialization” are sufficient to stabilize the MAV after the throw. After about 1 s the
vehicle stabilizes already in attitude and in velocity. The convergence of the scene
depth requires about 6 s longer. This is due to the wrong initialization of the metric
scale factor which generally converges slower than the other states in the system.
Once all states are converged and the vehicle fully stabilized (after about 7 s in the
test in Fig.
4.5
), we have time to initialize a full VSLAM system as shown in [
65
].
=
38 s and toss it at
t
=