Graphics Reference
In-Depth Information
Table 4.1
SWaP performance of tested computing platforms
Platform
Size
(footprint)
(mm)
Weight
(g)
Power
consumption
(W)
Cores
Vision
front-end
frame rate
(Hz)
CPU load
(% )
Workload
(% )
Asctec
mastermind
144
×
135 300
30
2
30
59
30
Odroid-X2 dev.
board (4412)
including heat
sink
90
×
94
122
8
4
30
125
31
Odroid-U2
(4412) stripped
down version
48
×
52
12
5
4
30
125
31
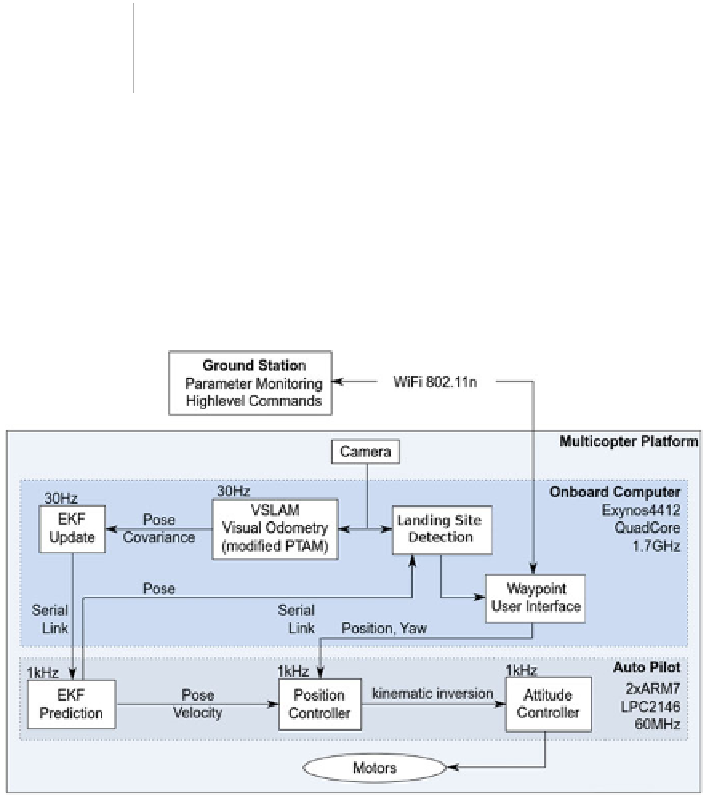
Fig. 4.3
System overview of the vision-aided pose estimation frame work
4.2.3.1 Map-Based Approach
Figure
4.3
gives an overview of the distributed implementation of our approach on
the vehicle. All computational-expensive components are executed on the high-level
flight computer, which includes VSLAM and pose filter update (EKF-update) as well
as landing site detection. The EKF-update is passed down to the prediction loop that
is executed on the autopilot board for efficiency reasons: the prediction loop, which
includes IMU integration, and the position controller that uses the estimated pose to
control the vehicle, both run at 1 kHz on a dedicated ARM7 microcontroller.