Graphics Reference
In-Depth Information
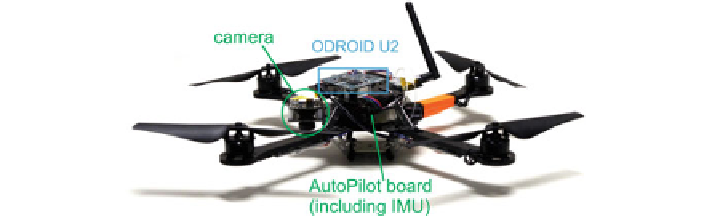
Fig. 4.1
Asctec Hummingbird with Odroid-U2 flight computer mounted on
top
4.2 Pose Estimation
We start with explaining our pose estimation framework that is running onboard our
quadrotors only using inputs from a camera and an IMU. We first present the related
work followed by the detailed description of our two approaches and conclude with
experimental results using the embedded hardware.
4.2.1 Related Work
Autonomous flights in unknown environments exclude the use of motion capture
systems for MAV pose estimation as done for example in [
39
]. Furthermore, using
GPS is not always reliable due to effects such as shadowing or multipath propagation
in city-like environments. Therefore, commonly used sensors for GPS-independent
MAV state estimation are stereo [
38
] and monocular cameras [
63
] as well as laser
scanners [
57
]. Since heavy sensors cannot be used on low SWaP platforms and addi-
tional payload directly reduces endurance, monocular visual-inertial state estimators
might be the most viable choice for MAVs.
Processing the vast information of the camera is a computationally complex task
and cannot be processed at high rate. Multicopter MAVs require fast and precise con-
trol (and thus state estimates) at all times because the systems are inherently unstable.
Hence, we propose to fuse the visual information with high-rate inertial cues from an
IMU. We can categorize such a fusion into
loosely-coupled
and
tightly-coupled
.The
loosely-coupled philosophy treats the inertial and visual units as two separate mod-
ules running at different rates and exchanging information, while the tightly-coupled
paradigm combines both sources of information into a single, optimal filter. In gen-
eral, loosely-coupled approaches are much less computationally expensive, since
they use the low-dimensional processed visual information as measurement rather
than every single feature. For this reason, we discuss a loosely-coupled Extended
Kalman Filter (EKF) approach in this work. Among the loosely-coupled approaches
are the works of [
2
,
3
,
15
,
19
,
42
,
51
,
67
], while among the tightly-coupled ones
are those of [
8
,
13
,
24
,
27
-
29
,
33
,
34
,
47
,
58
].