Graphics Reference
In-Depth Information
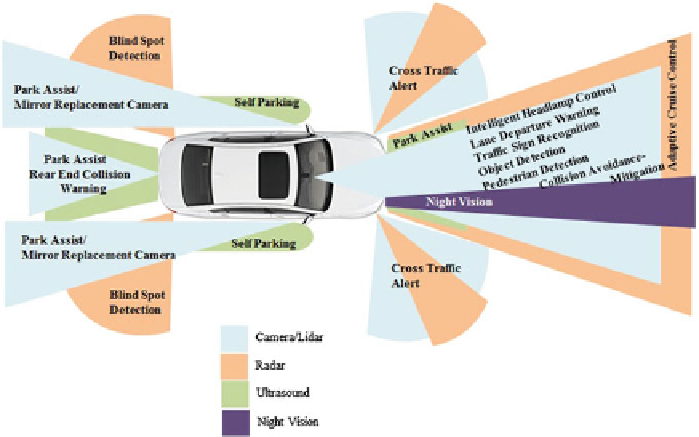
Fig. 3.1
Key application areas for Advanced Driver Assistance (ADAS). Sensor type and position
are indicated using different colors
LDW/LKA
According to National Highway Traffic Safety Administration's (NHTSA) data [
7
],
64.4% of all single-vehicle accidents in the USA are caused by running off from the
road. Among such crashes, 95.1% of the critical reasons were driver related. Lane
keep assist technology is based on input from camera and it can warn the driver
when vehicle is about to deviate from its traffic lane. The system can also work in
combination with automatic cruise control to help driver steer and keep the vehicle
on course.
Typically, lane keep assist has two functions: the lane departure warning (alerts the
driver with sound when the car starts to deviate from its lane) and lane keeping assist
(helps the car stay on course near the center of the lane by continuously applying
a small amount of countersteering force). Vision algorithms can recognize the road
lines and structures (yellow lines/white lines, Botts' dots, etc.) and based on vehicle's
driving situation, the system can control the electronic power steering (EPS).
The world's first lane departure warning was introduced by Nissan in 2001. Toy-
ota and Honda followed by introducing their lane monitoring systems in 2002 and
2003, respectively. Two years later, Toyota added a lane keep assist to their system.
Lexus introduced a stereo camera system with multimode lane keep assist and more
sophisticated object recognition processors in 2006. In Europe, Citroen was first to
offer lane assist feature in 2005. This system used infrared sensors to monitor lane
markings on the road surface, and a vibration mechanism in the seat to alert the
driver of deviations. Two years later, Audi offered its lane keep assist feature on Q7.
The system was camera based and used the steering wheel vibrations to warn the