Graphics Reference
In-Depth Information
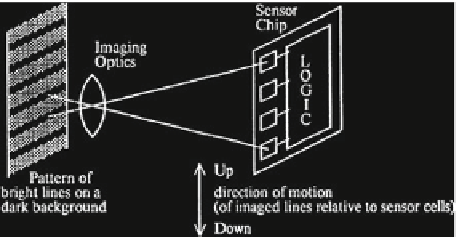
Fig. 1.9
Light lines
in a dark
background can be imaged as
shown here, and tracked using
a linear array of just four
pixels, using the circuit of
Fig.
1.8
concept this way in my current work on machine hearing [
22
]. Another interpretation
of nonlinear lateral inhibition, rather than as gain control, is as sparse coding—which
is essentially what the mouse sensor does. To arrive at most outputs being zero due to
inhibition, and only one or a few outputs being active, a competitive or comparative
dynamic process operates on initially small differences, resulting in a
winner-take-all
effect. This concept was later used in the silicon retina [
21
]. Variations on sparse
coding and winner-take-all coding have become popular in computer vision in recent
decades.
1.3 Symmetric Mutual Inhibition
The two-pixel and four-pixel examples show symmetric patterns of mutual inhibition:
if pixel A inhibits pixel B, then pixel B inhibits pixel A. This is not the only kind of
logical inhibition pattern that can be built, but it has the useful property that it leads
to a set of stable states that are easy to enumerate, and it is easy to build logic to
determine when a stable state has been reached.
Networks with symmetric inhibitory connections came to be known as Hopfield
networks, and were valued for these properties [
1
]. I recognized the value of the final
states being stable, and of being able to predict, enumerate, and detect stable states,
when working on extending the one-dimensional tracking idea to two dimensions.
In this sense, I was building both a Hopfield network, though not of the scale or
application envisioned by John Hopfield [
16
], and also a silicon retina, though not
of the scale or generality envisioned by Carver Mead [
29
]. The imager with lateral
inhibition was a nonlinear dynamical system, before that concept was popularized
with the notion of chaotic attractors; but the attractors in the mouse imager are stable
by design, not chaotic or periodic.
In Fig.
1.8
, the column of four NOR gates on the left, with feedback from their
outputs to the inputs of others, is the Hopfield network. The rest of the circuitry is
for resetting it, determining when it is reset, determining when it reaches a stable
state, repeating that sequence indefinitely, and tracking the motion implied by the
successive states. Comparable lateral inhibitory connections of limited range are