Graphics Reference
In-Depth Information
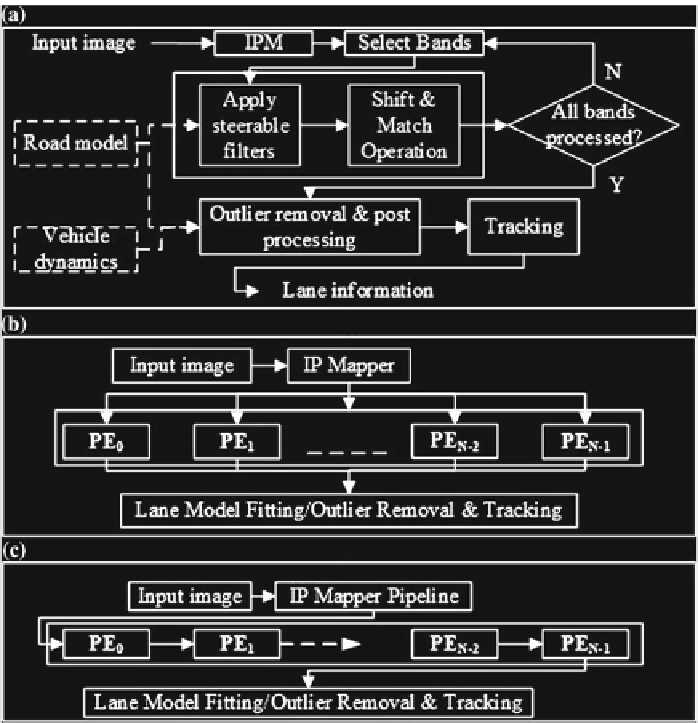
Fig. 10.4
Design options possible for the lane analysis method:
a
lane analysis using the proposed
scan band based lane feature extraction method,
b
parallel architecture with each PE catering to
each scan band and extracting from all scan bands in parallel,
c
pipelined architecture with each PE
also acting as a controller to predict positions in the next PE
10.4 Experimental Studies
In this section, we present a detailed study of the proposed lane feature extraction
method to address robustness and the constraints posed by embedded platforms [
18
].
We present the possible scenarios and trade-offs between robustness and metrics for
embedded realization that are possible using the proposed technique. We also present
the different configurations that can be explored for different conditions and user
requirements. As indicated previously, lane tracking is not considered in the scope
of evaluations and is considered for future work. Therefore, for the study presented
in this paper, lanes are assumed to be detected if the lanes are present in the ground