Graphics Reference
In-Depth Information
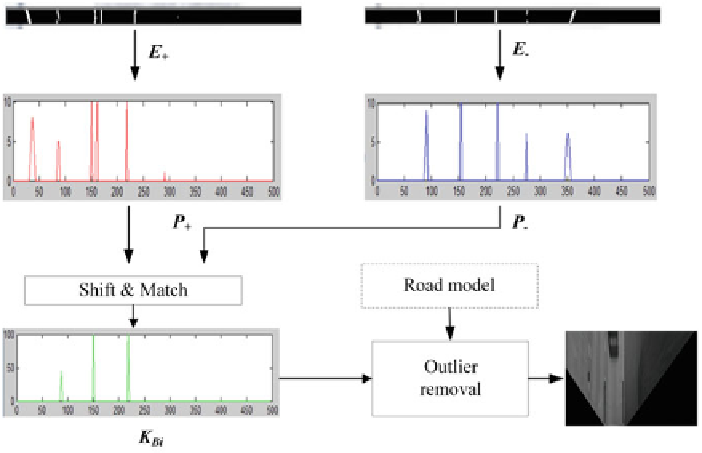
Fig. 10.3
Illustrating shift and match operation for band
B
i
mapping will eliminate any outliers that may be picked during the shift and match
operation. The lane estimation output is shown in Fig.
10.3
.
In order to cater for higher curvatures of the lanes, lane models such as clothoid
model can be also be used on the peak positions obtained in
K
B
i
to estimate curved
lanes and also eliminate the outliers. Furthermore, lane tracking using Kalman filters
using vehicle dynamics like yaw rate and steering angle information [
10
] increases
the robustness of outlier removal tremendously.
Figure
10.4
a shows the overall lane analysis method using the proposed lane
feature extraction method. Figure
10.4
b, c show two possible design options enabled
by the proposed scan band based lane feature extraction. The filtering operation and
shift-match operation that are applied on each scan band can be ported as a processing
element (PE). A parallel architecture with each scan band being processed by one
PE gives a parallel design option as shown in Fig.
10.4
b.
The second option shown in Fig.
10.4
c is a pipelined option, which can offer awide
variety of design implementations. If one PE is used, we get a serial implementation,
where each band is processed serially. The number of pipeline stages can be increased
depending on the number of PEs that are used. This pipelined design option can also
be used to control/predict the lane feature positions in each subsequent PE. In other
words, if PE
0
detects lane features at specific positions, this information can be
relayed to the PE
1
as positions around which lane features are expected. Vehicle
dynamics and road model information can further aid in the overall robustness and
efficiency of this implementation.