Graphics Reference
In-Depth Information
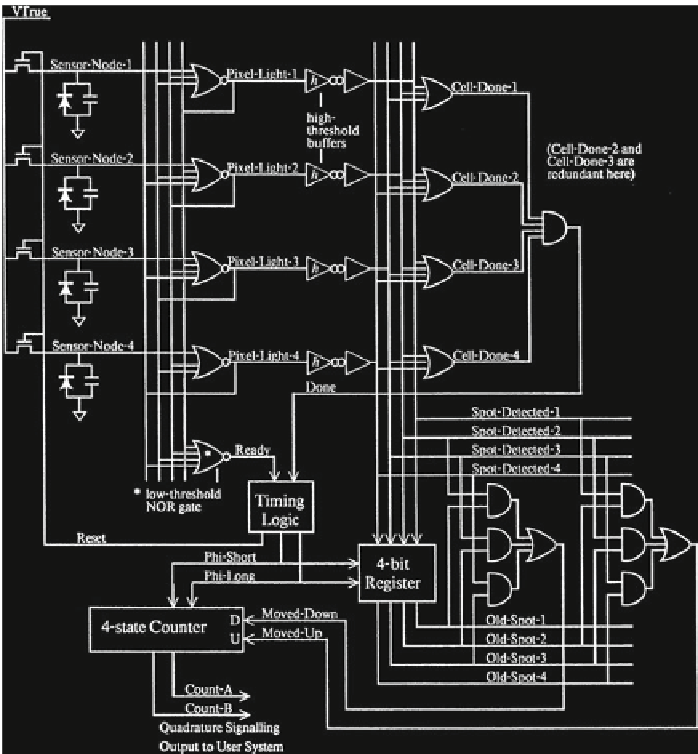
Fig. 1.8
A four-pixel version of the imager scheme of Fig.
1.7
, with timing and motion detection
logic. This linear imaging array has each pixel inhibiting neighbors up to two pixels away, but the
extreme end pixels do not inhibit each other, illustrating the idea of a radius of inhibition. The
done-detection logic is looking for every pixel to either be indicating light, or be inhibited by one
that is light; such states are stable
such as “contrast gain control”—an idea proposed in 1978 by Shapley and Victor
[
34
] for better modeling the cat retina. It is sometimes implemented as “divisive gain
control,” dividing by a neighborhood average as a way to control the local gain [
32
].
In the mouse sensor, the lateral inhibition implements a source of a
race
in time; the
first sensor channel to get enough signal inhibits its neighbors, and if there is a near
tie, they inhibit each other in a positive feedback loop until one wins.
I initially investigated lateral inhibition for robust automatic gain control in hearing
models, starting at Xerox before the optical mouse work; I have continued to use the