Graphics Reference
In-Depth Information
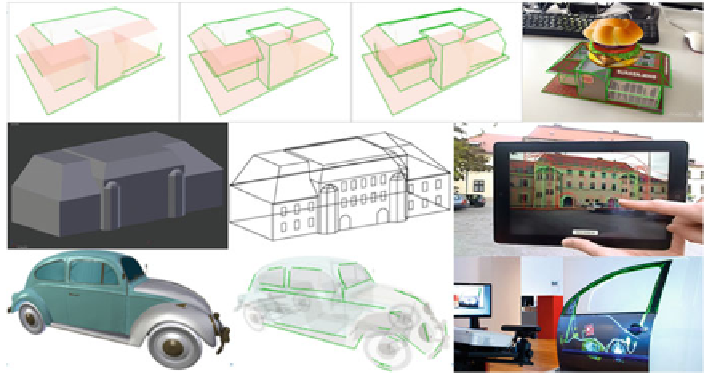
Fig. 7.11
Edge-based tracking examples
also includes texture information. However, even in this case, for many objects it is
difficult to extract an edge-model that will guarantee good camera pose initialization
in the wide range of initial viewpoints.
The tracker requires two models to work: a
surface model and an alien model as shown in Fig.
7.11
.
The surface model (left-
most image in the center row) is required for occlusion tests and for initialization
and assisting the Markerless 3D tracking. The line model (green lines in top row
images) is what is used to determine the correct pose in the camera image. The
more distinctively the lines of the model can be found as edges in the image, the
better the initialization will be. Surface model and line model, before (red) and after
initialization (green) are shown in Fig.
7.11
(rightmost image in the center row).
7.2.2 3D Vision and Augmented Reality
In all the above cases, real-world parameters such as illumination, jitter, noise,
scale, and rotation play a vital role in the quality of user AR experience. The
end-user/consumer, however, expects that an AR application works all the time
without the need of any special knowledge or complex user interface. To achieve
this there is a need for additional technologies that help to improve accuracy of the
AR experience. The AR application can render virtual objects onto a plane and hence
real-world objects need precise scale, distance from camera, and occlusion informa-
tion for seamless AR experience. 3D sensing with depth cameras can help to get AR
technology over this hurdle. Kinect [
7
] has already shown that depth information
can be used robustly for detecting and tracking of humans and the Kinect Fusion
project has demonstrated the capabilities for the reconstruction of rooms and objects