Graphics Reference
In-Depth Information
Fig. 6.8
The view interpolation module generates a virtual image and joint depth map
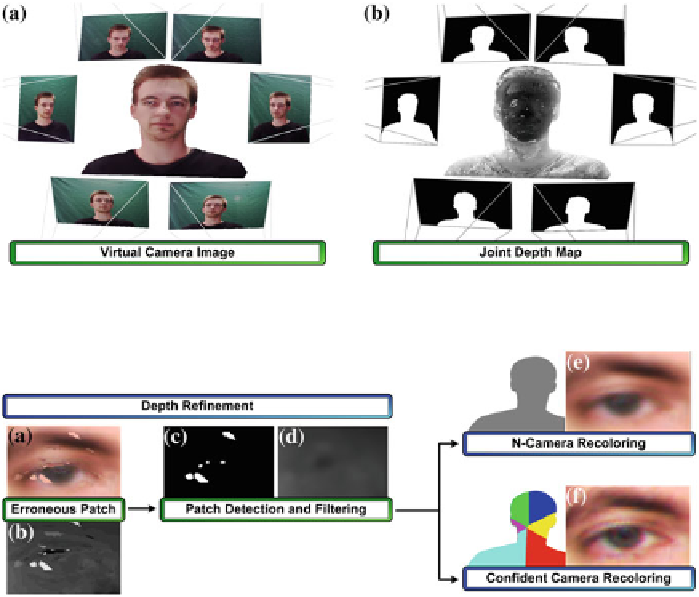
Fig. 6.9
Depth refinement and recoloring module concept
even more apparent in the depth map
Z
v
and we therefore propose a photometric
outlier detection algorithm that detects and restores the patches in
Z
v
.
To suppress the spatial high frequency speckle noise, we finally run a low-pass
Gaussian filter over the depth map.
6.3.3.1 Erroneous Patch Filtering
To detect erroneous patches, we propose a spatial filter kernel
, as depicted in
Fig.
6.10
a. For every pixel
z
v
of depth map
Z
v
, a two-dimensional depth consistency
check is performed according to Eq.
6.6
, where
ʻ
ʵ
is a very small constant to represent
the depth consistency,
ʻ
thereby defines the maximum size of patches that can be
detected.
Z
v
(
x
−
ʻ,
y
)
−
Z
v
(
x
+
ʻ,
y
)
<ʵ
or
(6.6)
Z
v
(
x
,
y
−
ʻ)
−
Z
v
(
x
,
y
+
ʻ)
<ʵ