Graphics Reference
In-Depth Information
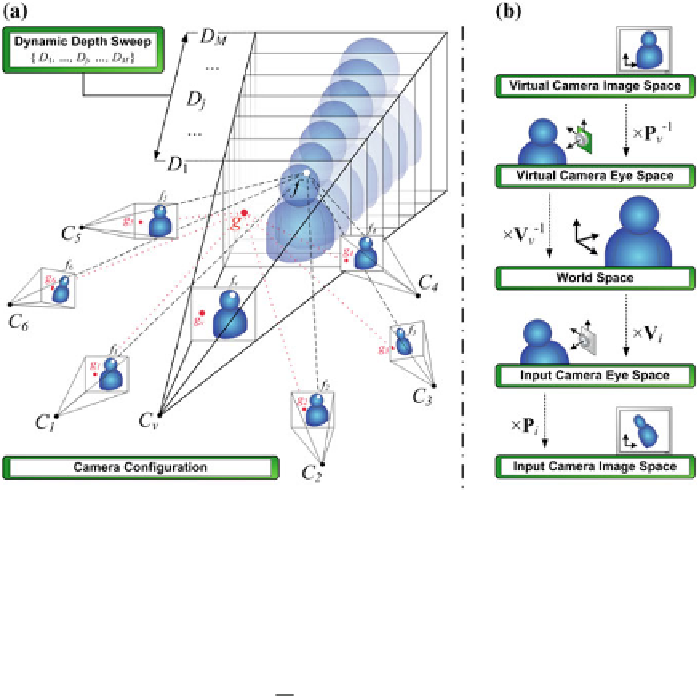
Fig. 6.7
Concept of the plane sweep algorithm
(i.e., interpolated) color
ˈ
and a jointly defined custommatching cost
ʺ
are computed
as in Eq.
6.5
.
N
N
2
I
i
N
,ʺ
=
ˈ
−
I
i
ˈ
=
(6.5)
3
N
i
=
1
i
=
1
As opposed to [
32
], we propose the use of all input cameras to compute the
matching cost. The plane is swept for the entire search range
, and
the minimum cost—together with the corresponding interpolated color—is per pixel
selected on a winner-take-all basis, resulting in the virtual image
I
v
(see Fig.
6.8
a)
and a joint depth map
Z
v
(see Fig.
6.8
b).
{
D
1
,...,
D
M
}
6.3.3 Depth Refinement
The interpolated image calculated in the previous section still contains erroneous
patches (see Fig.
6.9
a) and speckle noise due to illumination changes, partially
occluded areas, and natural homogeneous texturing of the face. These errors are