Graphics Reference
In-Depth Information
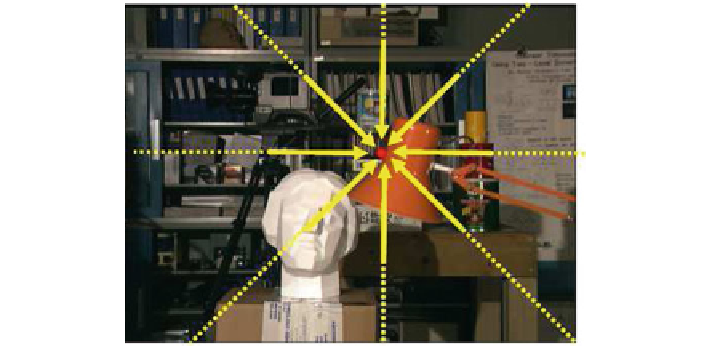
Fig. 5.12
The semiglobal algorithm [
13
], on each path, performs independent 1D disparity opti-
mizations. The figure considers only eight paths
The strategy adopted by SGM enables fast implementations on CPUs and GPUs
and it is very effective. For these reasons, SGM is frequently deployed in many
practical applications. However, in its original formulation, due to its high memory
footprint (it requires the entire DSI), it is not well suited to a computing architecture
without a large amount of fast external memory. Moreover, in its original formulation,
the SGM algorithm scans reference and target images two times (from top to bottom
and then from bottom to top) making unfeasible the stream processing methodology
required by our target architecture.
Nevertheless, by deploying a subset of the original paths (e.g., only four paths),
the SGM algorithm becomes suitable with acceptable performance degradation for
our target platform. We report in Sect.
5.6
experimental results concerned with our
implementation of the SGM algorithms adopting this strategy.
Concerning FPGA implementations of the SGMalgorithm, Gehrig et al. [
9
]imple-
mented the original algorithm proposed in [
13
] by means of a two-pass approach on
downscaled half resolution input images (originally at 680) using 8 paths. Differ-
ently, Banz et al. [
3
] proposed a simplified version of the SGMalgorithm for hardware
implementation aimed at reducing memory constraints using 4 paths (0, 4, 2 and 7
in Fig.
5.13
).
5.6 Experimental Results
In this section, we report preliminary experimental results concerned with the imple-
mentation of three stereo vision algorithms—belonging to the three classes defined
in the previous section—in the outlined computing architecture made of a sin-
gle FPGA without additional external devices, with the exception of a high-speed