Graphics Reference
In-Depth Information
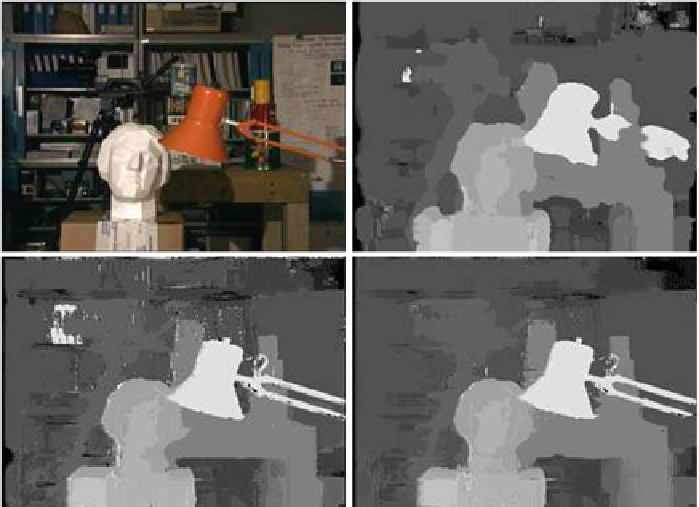
Fig. 5.10
To p l e f t
, original reference image of the Tsukuba stereo pair [
28
,
29
].
Top right
, disparity
map obtained by the FW approach.
Bottom left
, disparity map obtained by the AW algorithm [
46
].
Bottom right
, disparity map obtained by the Fast Bilateral Stereo algorithm [
19
]
implementation. Observing the figure, we can also notice that algorithms based on
the adapting weights strategy are much more accurate near depth discontinuities.
In [
23
], further optimizations compared to FBS have been devised, including a
preselection
of potential candidate disparities and asymmetric weight computations
making also this algorithm a candidate for hardware implementation.
Zhang et al. [
48
] described a different and effective strategy for cost aggregation
based on two orthogonal cost aggregation phases. As for many previous methods, this
approach heavily relies on incremental calculation schemes for fast cost aggregation.
A different two-phase strategy to reduce the computational burden of the original
AW approach consists in the two-pass aggregation described in [
43
]. In this method,
originally deployed within a Dynamic Programming framework, the nonseparable
weighted cost computation of AW is approximated with a vertical cost aggregation,
followed by an horizontal aggregation of the costs computed during the first phase
(i.e., vertical cost aggregation). Compared to AW, this simplified strategy enables to
obtain similar results reducing significantly the number of operations from O(
n
2
)to
O(
n
), with
n
the cardinality of the support window.
Finally, it is worth noting that some recent local algorithms [
7
,
27
] filter the DSI
according to the guided filtering technique [
12
], thus enabling weighted cost aggre-
gation in constant time. Such approaches massively exploit incremental calculation