Information Technology Reference
In-Depth Information
.
Group 2
.
. . .
. . .
Group 1
Transmission
. . .
.
. . .
. . .
. . .
. . .
Retrieval
. . .
Group 1
Group 2
Group 1
Group 2
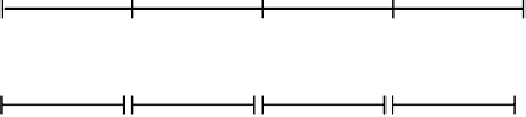
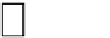
Figure 3.6
Illustration of the Grouped Sweeping Scheme with two groups
rounds of the
g
different groups. Figure 3.6 illustrates this GSS scheduler with two groups of
media streams.
There are two important characteristics in GSS. First, a media stream can join any one of the
groups as long as the group is not already running at full capacity. Second, transmission of a
data block lasts for a macro service round (i.e.,
g
micro service rounds) to sustain a continuous
transmission of media data to the client while waiting for the next media block to be retrieved.
Using GSS, the retrieval of a data block can be completed in a shorter time than in the case
of SCAN/CSCAN. For example, suppose at full capacity the server can serve
k
concurrent
media streams. The service round length in SCAN will then be equal to
t
max
round
(
k
). However, if
/
we employ GSS with two groups, then each group will serve up to
k
2 requests and so the
micro-round length will be equal to
t
max
round
(
k
/
2) while the macro-round length will be equal to
2
t
max
2).
This shorter service round length is desirable in terms of buffer requirement. A buffer is
occupied from the time a service round begins to the time the data retrieval is completed. Thus,
comparing GSS to CSCAN, it is clear that the buffer-holding time is reduced from
t
max
round
(
k
/
round
(
k
)to
t
max
2), thus allowing the buffer to be reused more quickly for the next service round. With
g
groups, it can be shown [1] that the buffer requirement of GSS is given by
round
(
k
/
k
k
g
Q
B
GSS
=
+
(3.8)
Comparing GSS to CSCAN's buffer requirement 2
kQ
, it is clear that we can reduce the buffer
requirement by using GSS with more groups (i.e., increasing
g
).
On the other hand, a new user joining the system running GSS may also experience shorter
admission delay. This is possible because the new stream can join
any
of the
g
groups to
receive service. If the new stream arrives in the middle of, say, micro-round serving group
i
, for example, then it can simply join the next group ((
i
1) mod
g
) provided that it is not
already fully utilized. In this case the average delay is only 1.5
t
max
+
round
(
k
/
g
), which is shorter than
the corresponding delay under CSCAN (i.e., 1.5
t
max
round
(
k
)).
From the previous discussion it seems that we should use GSS with as many groups as
possible to reduce buffer requirement and admission delay. Taking it to the limit for a server




































































































































































































Search WWH ::

Custom Search