Information Technology Reference
In-Depth Information
Table 13.1
System parameters used in computing numerical results
System parameter
Symbol
Value
Average Failure-Detection Time
1/
ω
6 sec
Node MTTF
1/
λ
50,000 hrs
1/
ε
Node MTTR
48 hrs
Number of Servers
N
S
64
1E+65
FEC
1E+60
K
min
=10
1E+55
K
min
=9
1E+50
K
min
=8
1E+45
K
min
=7
1E+40
K
min
=6
1E+35
K
min
=5
1E+30
K
min
=4
1E+25
1E+20
K
min
=3
K
min
=2
1E+15
1E+10
K
min
=1
100000
1
1
0
5
10
15
20
25
30
35
35
Level of redundancy (Kmax)
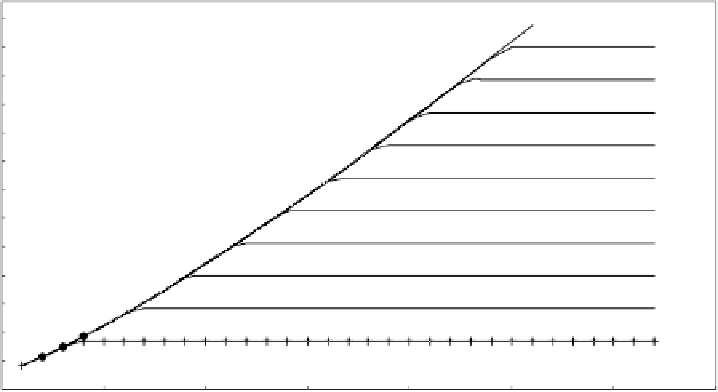
Figure 13.5
System MTTF of PRT and FEC with average detection time equal to 6 seconds
13.5.1 Effect of Detection Time Distribution
In Section 13.4, we use the Erlang-
k
distribution to model different types of distributions for
the failure detection time. We have computed the MTTF of a system with
K
min
=
10 and
K
max
=
32 for different values of
k
and find that differences in the shape of the detection time
distribution have negligible effect on the system MTTF. For example, with a mean detection
time of 1
60 seconds, the system MTTF is increased by only 8.7*10
−
45
% when
k
is
increased from 1 to 10. This observation reflects the fact that the detection time is many orders
of magnitude smaller than the server MTTF (e.g., tens of seconds versus tens of thousands of
hours) and thus changes in its distribution have little effect on the system MTTF. Therefore,
we will simply use the Erlang-1 distribution, i.e., exponential distribution, to compute the
numerical results in the following sections.
/ω
=
13.5.2 Bandwidth Overhead Reduction
Figure 13.5 compares the systemMTTF of FEC and PRT versus the level of redundancy in the
system (i.e.,
K
for FEC and
K
max
for PRT). For FEC, the systemMTTF increases exponentially











































































































































Search WWH ::

Custom Search