Information Technology Reference
In-Depth Information
40
30
BS (PRT, N
S
=5)
20
BS (PRT, N
S
=9)
BS (PRT, N
S
=13)
SSS (PRT, N
S
=5)
10
SSS (PRT, N
S
=9)
SSS (PRT, N
S
=13)
SSS (PRT & RSS)
0
2
6
0
4
8
10
Failure-detection Delay (seconds)
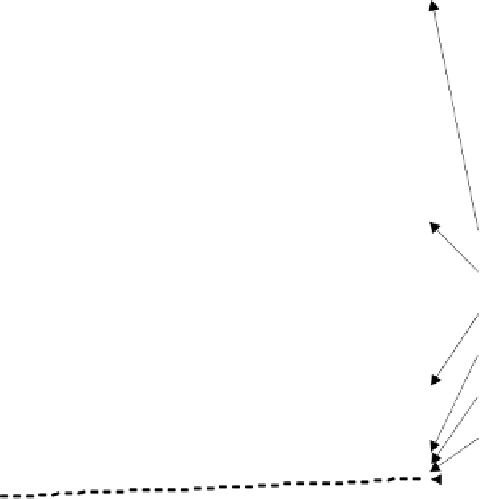
Figure 11.9
Client buffer requirement versus failure-detection delay
parity groups. Hence as
K
increases, so do the parity group size and, consequently, the buffer
requirement. By contrast, redundant stripe units are not transmitted until failure is detected
under PRT with RSS. Therefore, the buffer requirement does not depend on
K
at all.
11.7.2 Buffer Requirement versus Failure-detection Delay
Figure 11.9 studies the sensitivity of buffer requirement with respect to failure-detection delay
for various PRT system configurations. FEC is not plotted because the buffer requirement is
independent from the failure-detection delay. For all cases in Figure 11.9, the buffer requirement
increases with longer failure-detection delay. The results show that sub-schedule striping again
achieves lower buffer requirement in general, with PRT/RSS achieving the smallest buffer
requirement.
11.7.3 Buffer Requirement versus System Scale
Figure 11.10 plots the client buffer requirement versus the number of servers in the system
(i.e., system scale). The level of redundancy is one (i.e.,
K
1) and the failure-detection delay
is 2 seconds. The first result is that block striping is not scalable. This extends the results
in Chapter 10 for the non-fault-tolerant case to FEC and PRT. The second result is that sub-
schedule stripingwith PRT is also not scalable, although the slope is smaller than block striping.
=


























Search WWH ::

Custom Search