Geography Reference
In-Depth Information
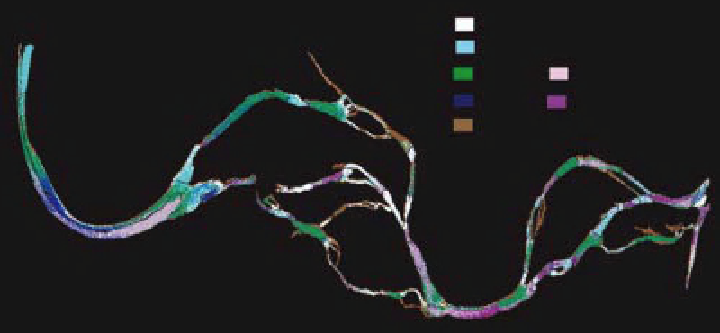
High gradient riffle
Low gradient riffle
Glide
Pool
Run
Rough water run
Eddy drop zone
Figure 4.5
Supervised classification used to construct an instream habitats map of a portion of the Lamar River in Yellowstone
National Park with the Probe-1 sensor.
Gilvear et al. (2004) used CASI imagery to identify river
morphologies as well asmany artificial features of interest.
More advanced supervised classification methods such
as Spectral Angle Mapper (SAM) can sometimes take
fuller advantage of the wealth of spectral information in
hyperspectral imagery better than traditional supervised
classification techniques. This is not always the case, how-
ever; Jollineau and Howarth (2008) compared SAM and
maximum likelihood classification using CASI imagery
over wetlands and found SAM to not be as good as the
more traditional approach. Geostatistical techniques or
techniques based on spatial feature recognition can often
be used for supervised classification, and sometimes do
some better than many spectral-only techniques. Harken
and Sugumaran (2005), for example, compared SAM
to an object-oriented (i.e. spatial feature recognition)
supervised classification algorithm and found the object-
oriented approach to be significantly more accurate using
high-spatial resolution data.
Although less commonly used in the hyperspectral
remote sensing of rivers, unsupervised classification is
another powerful technique to extract fluvial environ-
ments from imagery. Legleiter (2003) used canonical
discriminate analysis to show that unsupervised classifi-
cation explained much more of imaged stream habitat
variability compared with supervised approaches based
on in situ field measurements. More advanced unsuper-
vised techniques, such as artificial neural networks and
self-organising maps, have yet to be employed by river
practitioners.
Empirical regression between continuous water vari-
ables (depth, water clarity, etc.) and imagery is a very
common use for multispectral and hyperspectral image
processing. The work of Marcus et al. (2003) is one
straightforward use of multiple linear regression to pre-
dict water depth given hyperspectral imagery and some
groundmeasurements of depth for training. Moving from
fairly small rivers to large rivers, estuaries, and bays, Chen
et al. (2007a) used regression-based approaches to esti-
mate Tampa Bay turbidity fromMODIS reflectance. They
also estimated both water clarity and Secchi disk depth
through regression of MODIS imagery against ground
measurements (Chen et al., 2007b). While MODIS does
not have the number of bands associated with most
hyperspectral sensors (Table 4.1), it does have enough to
effectively use many of the same techniques commonly
used in hyperspectral remote sensing.
In principle, all river remote sensing imagery should
first be processed to remove the effects of the atmosphere;
these can obscure and complicate the optical signals leav-
ing the river. Some statistical-empirical methods are fairly
robust and do not require extensive atmospheric effect
removal. However, such atmospheric correction becomes
absolutely crucial if reference spectra are to be used in
comparison with imagery in order to extract water vari-
ables, rather than using in-situ calibration data (Aspinall
et al., 2002). There are many approaches to removing the
effects of the atmosphere; some require the collection of
in situ data, some rely on physically-based models of the
atmosphere, and some use specific in-scene information
(Reinersman et al.,1998; Mustard et al., 2001). Atmo-
spheric processing of hyperspectral imagery is particularly
crucial in the case of rivers, because water vapour above
the river environment can significantly alter the optical
signals in a number of wavelengths, as can other effects
including dust, haze, smoke, and a variety of other issues.
Search WWH ::

Custom Search