Geography Reference
In-Depth Information
Image 1
Image 2
Image 1
Image 2
Wood object
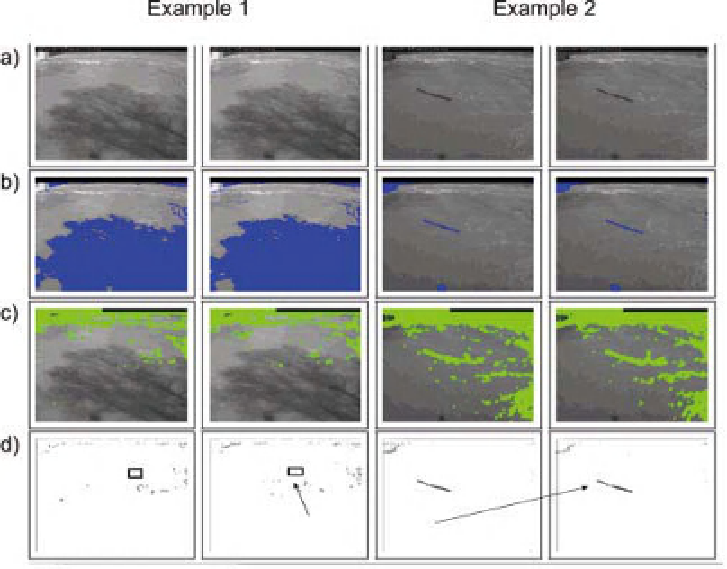
Figure 16.9
Image segmentation steps involved in floating wood identification procedure for a small object in shadows (Example 1)
and a larger object in sunlight: a) original images, b) intensity masks, c) gradient masks, and d) resulting combinations of all
segmentations.
16.5.4.3 Distinction of wood and water waves
through object tracking
Despite the use of the temporal difference mask to reduce
false detections, a number of water waves were present and
in motion for consecutive frames. To distinguish between
wood and water waves it was necessary to utilise some
additional property of the wood. Given that water travels
from left to right in the image frame, it was reasoned that
wood must also travel in the same direction while the
direction of wave propagation will be more random and
would tend to disappear over time. To track the move-
ments of objects, their meta-centroids were represented
at each time step in a summary image. A multi-segment
vector was formed in the summary image due to the
movement of objects in a series of frames (Figure 16.10).
The algorithm distinguished wood objects as those for
which the meta-centroids were present in a number of
consecutive images and moved continuously from left to
right. Parameters were tested for different type lighting sit-
uations and different length of wood objects. It was deter-
mined that the optimum number of consecutive images
to distinguish wood objects from waves was five images,
or a total time of 1 second for the video recording at 5 Hz.
Wood
Waves
Wave
Figure 16.10
Example of summary image showing typical
object displacement vectors.
16.5.5 Results
A comparison of the number of detected wood (
N
d
)
to the number of wood pieces identified from the

Search WWH ::

Custom Search