Geography Reference
In-Depth Information
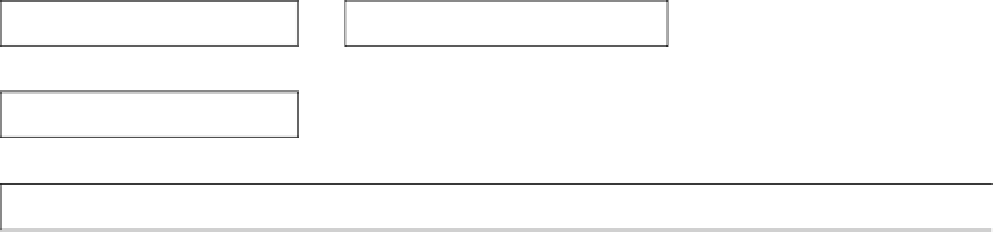
Frame 1
Frame 2
Frame 3
Temporal difference (df1)
Temporal difference (df2)
Intensity Mask
(MI)
Gradient Mask
(MG)
Intensity Mask
(MI)
Gradient Mask
(MG)
Resulting contours
MI
Resulting contours
MI
∩
MG
∩
df1
∩
MG
∩
df2
Find barycenter of center of mass
Find barycenter of center of mass
Resumed Image
Figure 16.8
Image analysis procedure for identification of floating wood from video imagery.
linear discriminate technique, a standard method used
in statistics for data clustering and pattern recognition,
was applied to distinguish intensity clusters and obtain a
intensity mask (MI) of objects or regions in each image
frame (Haralick and Shapiro, 1985, Jain et al., 1995). This
technique produced very good segmentation of images
and identification of regions in the absence of direct
sunshine (Example 1, Figure 16.9b) but was compro-
mised by shadows on the water surface (Example 2,
Figure 16.9b). In addition, water waves frequently had
similar intensity values to wood, resulting in classifica-
tion errors.
Due to possible errors associated with histogram
thresholding, it was necessary to integrate spatial features
of the image with spectral features. For this reason,
images were also analysed using an edge-detection
algorithm in which the local gradients in image-intensity
values were used to define boundaries between regions
within the image (Chapron, 1997, Zugaj and Lattuati,
1998, Zhao, 2008). The resulting image is called a
gradient mask (MG) and is obtained for each image
frame (Figure 16.9c). The advantage of a gradient mask
is that it can be used to detect objects even when
illumination is not constant over the entire image due
to shadows from trees and the bridge. However, due to
the roughness of the water surface, both water waves and
wood have strong gradients in intensity values, and a
large number of false detections occur if this method is
used exclusively.
To reduce the number of false detections, an addi-
tional mask was calculated from the temporal difference
between two consecutive frames (df). This mask was
applied based on the principle that wood will be present
in consecutive video frames while the majority of water
waves will be stationary or dispersed between images. A
final segmented image was calculated from the intersec-
tion of the intensity mask (MI), the gradient mask (MG),
and temporal inter-frame difference (df). This final image
is a binarymatrix that identifies all detected objects within
the frame (Figure 16.9d).
16.5.4.2 Calculating a 'meta-centroid' for objects in
close proximity
An additional problem from the image segmentation pro-
cedure is that not all of the detected objects are distinct.
For example, a single wood object can be made of a num-
ber of parts such as roots and branches. Part of the trunk
may be submerged, resulting in the appearance of distinct
objects. In addition, the size and shape of wood objects
can change from one frame to the next due to water waves
and the motion of the wood. Multiple objects identified
in the image segmentation must be grouped together to
match real objects and avoid false detections. This was
accomplished by calculating the distances between all
object centroids in an image and grouping close objects
and calculating their 'meta-centroid' based on a criterion
for the minimum distance between centroids.









































Search WWH ::

Custom Search