Geography Reference
In-Depth Information
1000km
Aerial photo's
Airborne
LiDAR
GPS
1km
1m
Theodolite
Terrestrial LiDAR
Photogrammetry
1mm
1 day
1 month
1 year
1000 years
Time scale
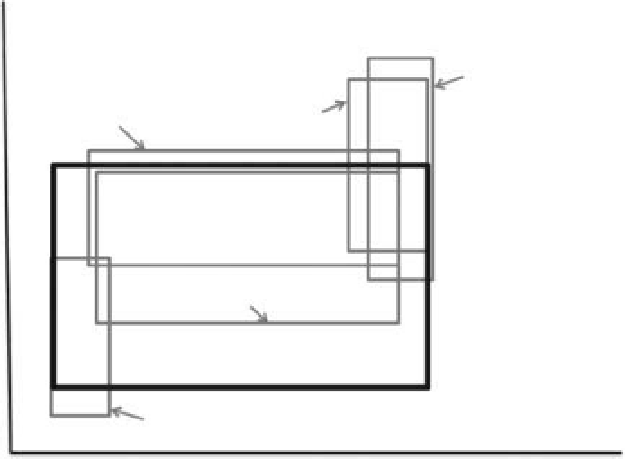
Figure 14.1
The range of surveying techniques available for monitoring fluvial systems across a range of spatial and temporal scales.
Terrestrial laser scanning overlaps a number of other techniques and thus represents a versatile survey method of survey (After
Heritage and Hetherington, 2007).
accuracy; EDM theodolite surveys suffer from long survey
times resulting in reduced data density if large areas are
measured (Figure 14.1).
The dataset, commonly referred to as a 'point cloud', can
provide a 3-D impression or visualisation of the feature
being measured. The maximum range achievable with a
terrestrial LiDAR depends strongly on the meteorolog-
ical visibility; at lower visibility, the maximum range is
reduced due to atmospheric attenuation.
The conventional scanning methodology is to use mea-
surements to a number of common targets (reflectors).
This allows multiple scans to be related to each other,
and to be georeferenced to an existing control network.
In essence, the scanner is placed at one location and mea-
surements taken to a number of targets as well as the actual
area of interest (see case study below). The scanner is then
moved to a second location and the process repeated,
using at least three common targets from the first scanner
location. This is necessary for linear features such as rivers
where banks, vegetation and bends in the channel obscure
scanning lines. The process is repeated until full coverage
of the site is achieved filling as many shadow areas as pos-
sible. Some laser scanners do not require reflector targets
to be located in the area being surveyed instead utilising
internally referenced common features to allow meshing
of scans to take place. This is especially advantageous in
areas where there may be difficulty in gaining access e.g.
opposite banks of rivers in spate.
14.1.1 Terrestrial laser scanning inpractice
Since the development of the first terrestrial laser scanner
in 1999 (Bryan, 2006), laser scanning technology has seen
a continued phase of product development, growth and
expansion into many areas of survey (Heritage and Large,
2009a). As a result, the development of sensors able to
rapidly collect 3-D surface information has enabled high-
density measurements to be made across landscapes that
are unsuited to more conventional approaches due to
their inaccessibility, hazardous nature or spatial extent
(Lim et al., 2009). A major advantage is in the rate of
data acquisition. First generation pulse-scanners con-
sisted of long range, high precision machinery collecting
on average 100 points per second, while later generations
(from 2004) concentrated on speed of data acquisition
and more on shorter ranges (Large and Heritage, 2009).
The newest generation machines measure approximately
150 000 points per second and, as a consequence, collect
a considerable amount of data during a survey. A com-
mon problem with LiDAR scanning techniques is that
the resultant data file sizes can be difficult to manage.
Search WWH ::

Custom Search