Geography Reference
In-Depth Information
8.2.3 Cameraconsiderations
d
A hyperspatial imaging system is a combination of the
platform and the sensor. It is vital to consider both
simultaneously to ensure the data provision needs of the
intended application are met. This entails considering
three further issues: (i) camera type; (ii) spatial resolution
and (iii) motion blur.
f
8.2.3.1 Camera type
The camera hardware used for image acquisition is pro-
gressively moving away from traditional and expensive
metric (i.e. scientific) cameras towards lower cost digi-
tal cameras designed for professional photographers and
low cost small format cameras designed for the mass
consumer market. Furthermore, in the context of remote
sensing, the film-based camera is now firmly on the path
to extinction. Given the rapid technical development in
the area of digital photography, professional grade cam-
eras can now offer many advantages in terms of cost and
ease of use. Often perceived as the most important char-
acteristic of a digital camera, sensor resolution is the first
criterion in camera selection. High-end digital cameras
are now routinely capable of delivering imagery in excess
of 15 million pixels (MP). In the examples illustrating
this chapter, all the platforms were equipped with com-
mercial cameras, mainly digital cameras with resolution
varying from 5 to 14 million of pixels (e.g., Canon EOS
500D/12.8 MP (reflex), Canon Powershot G5/5 MP (com-
pact); Canon PowerShot G9/12.1 MP (compact), Fujifilm
FinePix S3Pro/12 MP (reflec); Sony DSLR-A350/14.2 MP
(reflex)).
H
D
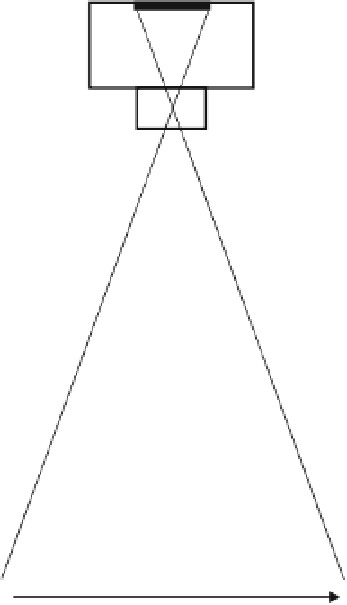
Figure 8.4
Schematic drawing showing the different
parameters for calculating survey width (D) and spatial
resolution: flight height (H), width of the imaging sensor (d)
and lens focal length (f).
the image can then be determined as the ratio of the D
and the number of pixels in an imaging sensor width. As
an example, Figure 8.5a presents four curves giving image
resolution as a function of flying height for hypothetical
SLR-type image sensors of 10, 15, 20, and 25 megapixels
and a focal length of 50 mm. Another crucial question,
also captured in Equation (8.1) is the ground foot of the
image (D). In Figure 8.5b, we have given D as a function
of flying height for the four sensors shown in Figure 8.5a.
Figure 8.5 clearly shows that high end digital cameras
with resolutions above 15 megapixels are well suited to
imaging small to medium rivers with resolutions below
5 cm and with a sufficient width to span a single channel.
The basic rule of thumb is simply that platforms flying
below 500 m and equipped with cameras in excess of
10 MP (with standard 35-50 mm lenses) will be capable
of acquiring hyperspatial imagery. These criteria are now
easily met when readily available camera technology is
mounted on existing platforms.
8.2.3.2 Spatial resolution
The resulting ground resolution for a given sensor used
at a given flying height can be determined with a few
simple geometric equations. Figure 8.4 gives a schematic
representation of an airborne camera in the process of
acquiring an image. Beams of light from the ground
target converge at the focal point of the lens and are
then projected onto the imaging sensor of the camera.
The distance from the convergence point to the imaging
sensor is known as the focal length. Geometrically, the
two triangles in Figure 8.4 are similar and we can state:
/
=
/
d
D
f
H
(8.1)
Where d is the width of the imaging sensor, D is the
ground footprint of the image, f is the lens focal length
and H is the flying height. The final ground resolution of












Search WWH ::

Custom Search