Geography Reference
In-Depth Information
1914710
1914720
1914730
Latitude (m)
(a)
1914740
1914750
1914760
1914710
1914720
1914730
Latitude (m)
(b)
1914740
1914750
1914760
1914710
1914720
1914730
Latitude (m)
(c)
1914740
1914750
1914760
1914710
1914720
1914730
Latitude (m)
(d)
1914740
1914750
1914760
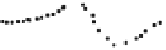
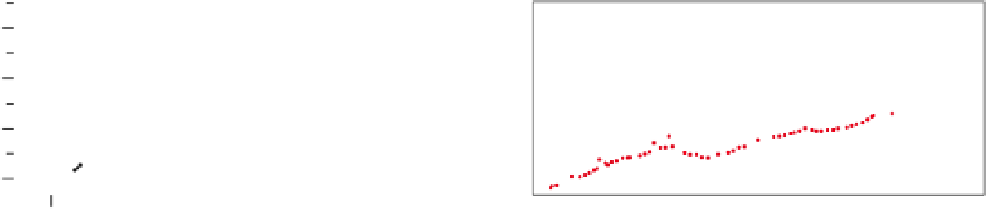
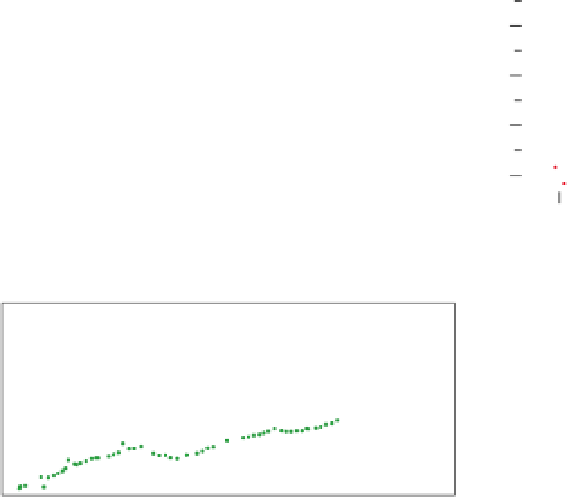
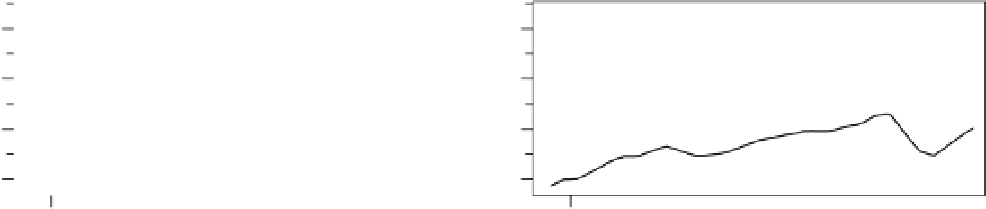
Figure 7.5a
A generic method for producing DEM illustrated along a latitudinal profile: a) row points cloud, b) selection of last
echoes, c) extraction of terrain points, d) terrain points interpolation to produce a raster DEM.
7.5.1.2 Vegetation structure and hydraulic friction
CHM is widely used to identify the location, height, and
crown width of trees (Popescu and Wynne, 2004). In
addition, Geerling et al. (2007) combined CHM, other
LiDAR-derived rasters representing vegetation structure
(minimum, mean, median, standard deviation, and range
heights), and spectrographic image rasters to classify and
map the plant community of the vegetation in a flood-
plain. If the classification successfully recognises bush
(87% accuracy) and forest (100% accuracy) from LiDAR
rasters alone, the combination with spectrographic image
rasters allows the recognition of bare and pioneer com-
munities, grass and herbaceous vegetation, and herba-
ceous and low woody vegetation with a 57% to 64%
accuracy.
Because LiDAR is capable of collecting information
under sparse targets and provides data at a high spa-
tial density, the floodplain vegetation structure can be
mapped efficiently. Consequently, LiDAR has renewed
the use of remote sensing in hydraulic modeling, partic-
ularly in the estimation of floodplain friction parameters
from vegetation height statistics (Asselman et al., 2002;
Cobby et al., 2001; Cobby et al., 2003; Mason et al., 2003)
or from fusion between high spatial resolution imagery
and LiDAR data (Forzieri et al., 2010).
Compared to optical techniques, LiDAR remote sensing
has the ability to provide information about the vertical
distribution of quite sparse targets, making LiDAR an
innovative technique for studying vegetation. The best
strategy for extracting information about vegetation from
LiDAR data is to perform a spatial analysis of the point
cloud. Using this approach, Antonarakis et al. (2008)
recognised the land-cover type (planted forest, natural
forest, type of soil) of three river meanders based on the
spatial distribution and reflectance of the LiDAR returns.
They determined the type of forest with an accuracy
between 83% and 98%. Nevertheless, because of the dis-
crete sampling of the LiDAR and due to occlusions that
can occur under a return, a spatial analysis of the point
cloud can pose some problems. Consequently, interpo-
lated rasters are traditionally used to derive vegetation
parameters. With this approach, a canopy height model
(CHM) is computed as the difference between the digital
surface model (DSM), which comes from the interpola-
tion of the first returns, and the digital elevation model
(DEM) (Figure 7.5b). The CHM, therefore, represents the
vegetation surface that is distinct from the ground surface.








































Search WWH ::

Custom Search